You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
122 lines
6.9 KiB
122 lines
6.9 KiB
--- |
|
comments: true |
|
description: Parking Management System Using Ultralytics YOLOv8 |
|
keywords: Ultralytics, YOLOv8, Object Detection, Object Counting, Parking lots, Object Tracking, Notebook, IPython Kernel, CLI, Python SDK |
|
--- |
|
|
|
# Parking Management using Ultralytics YOLOv8 🚀 |
|
|
|
## What is Parking Management System? |
|
|
|
Parking management with [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) ensures efficient and safe parking by organizing spaces and monitoring availability. YOLOv8 can improve parking lot management through real-time vehicle detection, and insights into parking occupancy. |
|
|
|
## Advantages of Parking Management System? |
|
|
|
- **Efficiency**: Parking lot management optimizes the use of parking spaces and reduces congestion. |
|
- **Safety and Security**: Parking management using YOLOv8 improves the safety of both people and vehicles through surveillance and security measures. |
|
- **Reduced Emissions**: Parking management using YOLOv8 manages traffic flow to minimize idle time and emissions in parking lots. |
|
|
|
## Real World Applications |
|
|
|
| Parking Management System | Parking Management System | |
|
|:-------------------------------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------------------------------------:| |
|
|  |  | |
|
| Parking management Aeriel View using Ultralytics YOLOv8 | Parking management Top View using Ultralytics YOLOv8 | |
|
|
|
|
|
## Parking Management System Code Workflow |
|
|
|
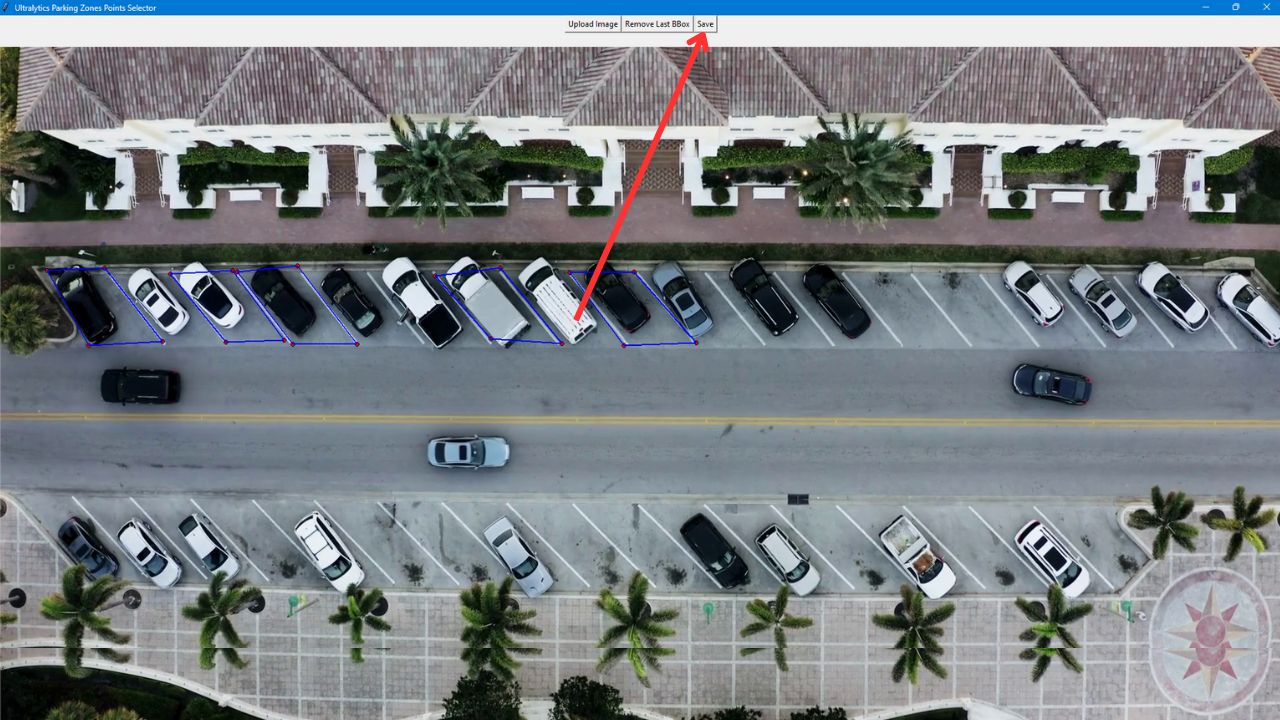
### Selection of Points |
|
|
|
!!! Tip "Point Selection is now Easy" |
|
|
|
Choosing parking points is a critical and complex task in parking management systems. Ultralytics streamlines this process by providing a tool that lets you define parking lot areas, which can be utilized later for additional processing. |
|
|
|
- Capture a frame from the video or camera stream where you want to manage the parking lot. |
|
- Use the provided code to launch a graphical interface, where you can select an image and start outlining parking regions by mouse click to create polygons. |
|
|
|
!!! Warning "Image Size" |
|
|
|
Max Image Size of 1920 * 1080 supported |
|
|
|
```python |
|
from ultralytics.solutions.parking_management import ParkingPtsSelection, tk |
|
root = tk.Tk() |
|
ParkingPtsSelection(root) |
|
root.mainloop() |
|
``` |
|
|
|
- After defining the parking areas with polygons, click `save` to store a JSON file with the data in your working directory. |
|
|
|
 |
|
|
|
|
|
### Python Code for Parking Management |
|
|
|
!!! Example "Parking management using YOLOv8 Example" |
|
|
|
=== "Parking Management" |
|
|
|
```python |
|
import cv2 |
|
from ultralytics.solutions.parking_management import ParkingManagement |
|
|
|
# Path to json file, that created with above point selection app |
|
polygon_json_path = "bounding_boxes.json" |
|
|
|
# Video capture |
|
cap = cv2.VideoCapture("Path/to/video/file.mp4") |
|
assert cap.isOpened(), "Error reading video file" |
|
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, |
|
cv2.CAP_PROP_FRAME_HEIGHT, |
|
cv2.CAP_PROP_FPS)) |
|
|
|
# Video writer |
|
video_writer = cv2.VideoWriter("parking management.avi", |
|
cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h)) |
|
|
|
# Initialize parking management object |
|
management = ParkingManagement(model_path="yolov8n.pt") |
|
|
|
while cap.isOpened(): |
|
ret, im0 = cap.read() |
|
if not ret: |
|
break |
|
|
|
json_data = management.parking_regions_extraction(polygon_json_path) |
|
results = management.model.track(im0, persist=True, show=False) |
|
|
|
if results[0].boxes.id is not None: |
|
boxes = results[0].boxes.xyxy.cpu().tolist() |
|
clss = results[0].boxes.cls.cpu().tolist() |
|
management.process_data(json_data, im0, boxes, clss) |
|
|
|
management.display_frames(im0) |
|
video_writer.write(im0) |
|
|
|
cap.release() |
|
video_writer.release() |
|
cv2.destroyAllWindows() |
|
``` |
|
|
|
### Optional Arguments `ParkingManagement()` |
|
|
|
| Name | Type | Default | Description | |
|
|--------------------------|-------------|-------------------|-----------------------------------------------------| |
|
| `occupied_region_color` | `RGB Color` | `(0, 255, 0)` | Parking space occupied region color | |
|
| `available_region_color` | `RGB Color` | `(0, 0, 255)` | Parking space available region color | |
|
| `margin` | `int` | `10` | Gap between text display for multiple classes count | |
|
| `txt_color` | `RGB Color` | `(255, 255, 255)` | Foreground color for object counts text | |
|
| `bg_color` | `RGB Color` | `(255, 255, 255)` | Rectangle behind text background color | |
|
|
|
### Arguments `model.track` |
|
|
|
| Name | Type | Default | Description | |
|
|-----------|---------|----------------|-------------------------------------------------------------| |
|
| `source` | `im0` | `None` | source directory for images or videos | |
|
| `persist` | `bool` | `False` | persisting tracks between frames | |
|
| `tracker` | `str` | `botsort.yaml` | Tracking method 'bytetrack' or 'botsort' | |
|
| `conf` | `float` | `0.3` | Confidence Threshold | |
|
| `iou` | `float` | `0.5` | IOU Threshold | |
|
| `classes` | `list` | `None` | filter results by class, i.e. classes=0, or classes=[0,2,3] | |
|
| `verbose` | `bool` | `True` | Display the object tracking results |
|
|
|