commit
cccce7c3cd
112 changed files with 3052 additions and 653 deletions
@ -0,0 +1,37 @@ |
||||
--- |
||||
comments: false |
||||
description: Discover Ultralytics' commitment to Environmental, Health, and Safety (EHS). Learn about our policy, principles, and strategies for ensuring a sustainable and safe working environment. |
||||
keywords: Ultralytics, Environmental Policy, Health and Safety, EHS, Sustainability, Workplace Safety, Environmental Compliance |
||||
--- |
||||
|
||||
# Ultralytics Environmental, Health and Safety (EHS) Policy |
||||
|
||||
At Ultralytics, we recognize that the long-term success of our company relies not only on the products and services we offer, but also the manner in which we conduct our business. We are committed to ensuring the safety and well-being of our employees, stakeholders, and the environment, and we will continuously strive to mitigate our impact on the environment while promoting health and safety. |
||||
|
||||
## Policy Principles |
||||
|
||||
1. **Compliance**: We will comply with all applicable laws, regulations, and standards related to EHS, and we will strive to exceed these standards where possible. |
||||
|
||||
2. **Prevention**: We will work to prevent accidents, injuries, and environmental harm by implementing risk management measures and ensuring all our operations and procedures are safe. |
||||
|
||||
3. **Continuous Improvement**: We will continuously improve our EHS performance by setting measurable objectives, monitoring our performance, auditing our operations, and revising our policies and procedures as needed. |
||||
|
||||
4. **Communication**: We will communicate openly about our EHS performance and will engage with stakeholders to understand and address their concerns and expectations. |
||||
|
||||
5. **Education and Training**: We will educate and train our employees and contractors in appropriate EHS procedures and practices. |
||||
|
||||
## Implementation Measures |
||||
|
||||
1. **Responsibility and Accountability**: Every employee and contractor working at or with Ultralytics is responsible for adhering to this policy. Managers and supervisors are accountable for ensuring this policy is implemented within their areas of control. |
||||
|
||||
2. **Risk Management**: We will identify, assess, and manage EHS risks associated with our operations and activities to prevent accidents, injuries, and environmental harm. |
||||
|
||||
3. **Resource Allocation**: We will allocate the necessary resources to ensure the effective implementation of our EHS policy, including the necessary equipment, personnel, and training. |
||||
|
||||
4. **Emergency Preparedness and Response**: We will develop, maintain, and test emergency preparedness and response plans to ensure we can respond effectively to EHS incidents. |
||||
|
||||
5. **Monitoring and Review**: We will monitor and review our EHS performance regularly to identify opportunities for improvement and ensure we are meeting our objectives. |
||||
|
||||
This policy reflects our commitment to minimizing our environmental footprint, ensuring the safety and well-being of our employees, and continuously improving our performance. |
||||
|
||||
Please remember that the implementation of an effective EHS policy requires the involvement and commitment of everyone working at or with Ultralytics. We encourage you to take personal responsibility for your safety and the safety of others, and to take care of the environment in which we live and work. |
||||
@ -0,0 +1,169 @@ |
||||
--- |
||||
comments: true |
||||
description: Explore the Fast Segment Anything Model (FastSAM), a real-time solution for the segment anything task that leverages a Convolutional Neural Network (CNN) for segmenting any object within an image, guided by user interaction prompts. |
||||
keywords: FastSAM, Segment Anything Model, SAM, Convolutional Neural Network, CNN, image segmentation, real-time image processing |
||||
--- |
||||
|
||||
# Fast Segment Anything Model (FastSAM) |
||||
|
||||
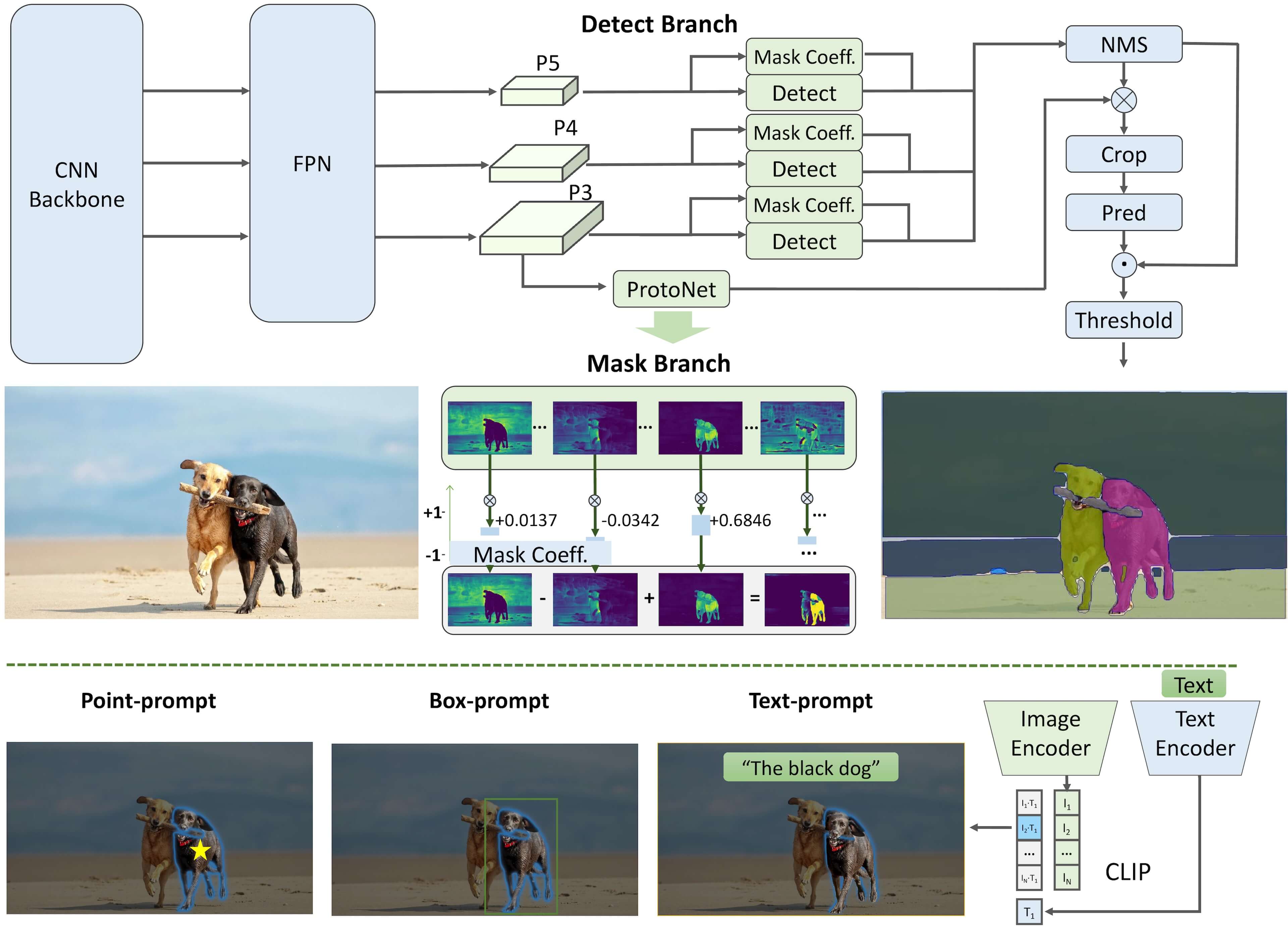
The Fast Segment Anything Model (FastSAM) is a novel, real-time CNN-based solution for the Segment Anything task. This task is designed to segment any object within an image based on various possible user interaction prompts. FastSAM significantly reduces computational demands while maintaining competitive performance, making it a practical choice for a variety of vision tasks. |
||||
|
||||
 |
||||
|
||||
## Overview |
||||
|
||||
FastSAM is designed to address the limitations of the [Segment Anything Model (SAM)](sam.md), a heavy Transformer model with substantial computational resource requirements. The FastSAM decouples the segment anything task into two sequential stages: all-instance segmentation and prompt-guided selection. The first stage uses [YOLOv8-seg](../tasks/segment.md) to produce the segmentation masks of all instances in the image. In the second stage, it outputs the region-of-interest corresponding to the prompt. |
||||
|
||||
## Key Features |
||||
|
||||
1. **Real-time Solution:** By leveraging the computational efficiency of CNNs, FastSAM provides a real-time solution for the segment anything task, making it valuable for industrial applications that require quick results. |
||||
|
||||
2. **Efficiency and Performance:** FastSAM offers a significant reduction in computational and resource demands without compromising on performance quality. It achieves comparable performance to SAM but with drastically reduced computational resources, enabling real-time application. |
||||
|
||||
3. **Prompt-guided Segmentation:** FastSAM can segment any object within an image guided by various possible user interaction prompts, providing flexibility and adaptability in different scenarios. |
||||
|
||||
4. **Based on YOLOv8-seg:** FastSAM is based on [YOLOv8-seg](../tasks/segment.md), an object detector equipped with an instance segmentation branch. This allows it to effectively produce the segmentation masks of all instances in an image. |
||||
|
||||
5. **Competitive Results on Benchmarks:** On the object proposal task on MS COCO, FastSAM achieves high scores at a significantly faster speed than [SAM](sam.md) on a single NVIDIA RTX 3090, demonstrating its efficiency and capability. |
||||
|
||||
6. **Practical Applications:** The proposed approach provides a new, practical solution for a large number of vision tasks at a really high speed, tens or hundreds of times faster than current methods. |
||||
|
||||
7. **Model Compression Feasibility:** FastSAM demonstrates the feasibility of a path that can significantly reduce the computational effort by introducing an artificial prior to the structure, thus opening new possibilities for large model architecture for general vision tasks. |
||||
|
||||
## Usage |
||||
|
||||
### Python API |
||||
|
||||
The FastSAM models are easy to integrate into your Python applications. Ultralytics provides a user-friendly Python API to streamline the process. |
||||
|
||||
#### Predict Usage |
||||
|
||||
To perform object detection on an image, use the `predict` method as shown below: |
||||
|
||||
```python |
||||
from ultralytics import FastSAM |
||||
from ultralytics.yolo.fastsam import FastSAMPrompt |
||||
|
||||
# Define image path and inference device |
||||
IMAGE_PATH = 'ultralytics/assets/bus.jpg' |
||||
DEVICE = 'cpu' |
||||
|
||||
# Create a FastSAM model |
||||
model = FastSAM('FastSAM-s.pt') # or FastSAM-x.pt |
||||
|
||||
# Run inference on an image |
||||
everything_results = model(IMAGE_PATH, |
||||
device=DEVICE, |
||||
retina_masks=True, |
||||
imgsz=1024, |
||||
conf=0.4, |
||||
iou=0.9) |
||||
|
||||
prompt_process = FastSAMPrompt(IMAGE_PATH, everything_results, device=DEVICE) |
||||
|
||||
# Everything prompt |
||||
ann = prompt_process.everything_prompt() |
||||
|
||||
# Bbox default shape [0,0,0,0] -> [x1,y1,x2,y2] |
||||
ann = prompt_process.box_prompt(bbox=[200, 200, 300, 300]) |
||||
|
||||
# Text prompt |
||||
ann = prompt_process.text_prompt(text='a photo of a dog') |
||||
|
||||
# Point prompt |
||||
# points default [[0,0]] [[x1,y1],[x2,y2]] |
||||
# point_label default [0] [1,0] 0:background, 1:foreground |
||||
ann = prompt_process.point_prompt(points=[[200, 200]], pointlabel=[1]) |
||||
prompt_process.plot(annotations=ann, output='./') |
||||
``` |
||||
|
||||
This snippet demonstrates the simplicity of loading a pre-trained model and running a prediction on an image. |
||||
|
||||
#### Val Usage |
||||
|
||||
Validation of the model on a dataset can be done as follows: |
||||
|
||||
```python |
||||
from ultralytics import FastSAM |
||||
|
||||
# Create a FastSAM model |
||||
model = FastSAM('FastSAM-s.pt') # or FastSAM-x.pt |
||||
|
||||
# Validate the model |
||||
results = model.val(data='coco8-seg.yaml') |
||||
``` |
||||
|
||||
Please note that FastSAM only supports detection and segmentation of a single class of object. This means it will recognize and segment all objects as the same class. Therefore, when preparing the dataset, you need to convert all object category IDs to 0. |
||||
|
||||
### FastSAM official Usage |
||||
|
||||
FastSAM is also available directly from the [https://github.com/CASIA-IVA-Lab/FastSAM](https://github.com/CASIA-IVA-Lab/FastSAM) repository. Here is a brief overview of the typical steps you might take to use FastSAM: |
||||
|
||||
#### Installation |
||||
|
||||
1. Clone the FastSAM repository: |
||||
```shell |
||||
git clone https://github.com/CASIA-IVA-Lab/FastSAM.git |
||||
``` |
||||
|
||||
2. Create and activate a Conda environment with Python 3.9: |
||||
```shell |
||||
conda create -n FastSAM python=3.9 |
||||
conda activate FastSAM |
||||
``` |
||||
|
||||
3. Navigate to the cloned repository and install the required packages: |
||||
```shell |
||||
cd FastSAM |
||||
pip install -r requirements.txt |
||||
``` |
||||
|
||||
4. Install the CLIP model: |
||||
```shell |
||||
pip install git+https://github.com/openai/CLIP.git |
||||
``` |
||||
|
||||
#### Example Usage |
||||
|
||||
1. Download a [model checkpoint](https://drive.google.com/file/d/1m1sjY4ihXBU1fZXdQ-Xdj-mDltW-2Rqv/view?usp=sharing). |
||||
|
||||
2. Use FastSAM for inference. Example commands: |
||||
|
||||
- Segment everything in an image: |
||||
```shell |
||||
python Inference.py --model_path ./weights/FastSAM.pt --img_path ./images/dogs.jpg |
||||
``` |
||||
|
||||
- Segment specific objects using text prompt: |
||||
```shell |
||||
python Inference.py --model_path ./weights/FastSAM.pt --img_path ./images/dogs.jpg --text_prompt "the yellow dog" |
||||
``` |
||||
|
||||
- Segment objects within a bounding box (provide box coordinates in xywh format): |
||||
```shell |
||||
python Inference.py --model_path ./weights/FastSAM.pt --img_path ./images/dogs.jpg --box_prompt "[570,200,230,400]" |
||||
``` |
||||
|
||||
- Segment objects near specific points: |
||||
```shell |
||||
python Inference.py --model_path ./weights/FastSAM.pt --img_path ./images/dogs.jpg --point_prompt "[[520,360],[620,300]]" --point_label "[1,0]" |
||||
``` |
||||
|
||||
Additionally, you can try FastSAM through a [Colab demo](https://colab.research.google.com/drive/1oX14f6IneGGw612WgVlAiy91UHwFAvr9?usp=sharing) or on the [HuggingFace web demo](https://huggingface.co/spaces/An-619/FastSAM) for a visual experience. |
||||
|
||||
## Citations and Acknowledgements |
||||
|
||||
We would like to acknowledge the FastSAM authors for their significant contributions in the field of real-time instance segmentation: |
||||
|
||||
```bibtex |
||||
@misc{zhao2023fast, |
||||
title={Fast Segment Anything}, |
||||
author={Xu Zhao and Wenchao Ding and Yongqi An and Yinglong Du and Tao Yu and Min Li and Ming Tang and Jinqiao Wang}, |
||||
year={2023}, |
||||
eprint={2306.12156}, |
||||
archivePrefix={arXiv}, |
||||
primaryClass={cs.CV} |
||||
} |
||||
``` |
||||
|
||||
The original FastSAM paper can be found on [arXiv](https://arxiv.org/abs/2306.12156). The authors have made their work publicly available, and the codebase can be accessed on [GitHub](https://github.com/CASIA-IVA-Lab/FastSAM). We appreciate their efforts in advancing the field and making their work accessible to the broader community. |
||||
@ -0,0 +1,9 @@ |
||||
--- |
||||
description: Optimize YOLO models' hyperparameters with Ultralytics YOLO's `run_ray_tune` function using Ray Tune and ASHA scheduler. |
||||
keywords: Ultralytics YOLO, Hyperparameter Tuning, Ray Tune, ASHAScheduler, Optimization, Object Detection |
||||
--- |
||||
|
||||
## run_ray_tune |
||||
--- |
||||
### ::: ultralytics.yolo.utils.tuner.run_ray_tune |
||||
<br><br> |
||||
@ -0,0 +1,54 @@ |
||||
# YOLOv8 OnnxRuntime C++ |
||||
|
||||
This example demonstrates how to perform inference using YOLOv8 in C++ with ONNX Runtime and OpenCV's API. |
||||
|
||||
We recommend using Visual Studio to build the project. |
||||
|
||||
## Benefits |
||||
|
||||
- Friendly for deployment in the industrial sector. |
||||
- Faster than OpenCV's DNN inference on both CPU and GPU. |
||||
- Supports CUDA acceleration. |
||||
- Easy to add FP16 inference (using template functions). |
||||
|
||||
## Exporting YOLOv8 Models |
||||
|
||||
To export YOLOv8 models, use the following Python script: |
||||
|
||||
```python |
||||
from ultralytics import YOLO |
||||
|
||||
# Load a YOLOv8 model |
||||
model = YOLO("yolov8n.pt") |
||||
|
||||
# Export the model |
||||
model.export(format="onnx", opset=12, simplify=True, dynamic=False, imgsz=640) |
||||
``` |
||||
|
||||
## Dependencies |
||||
|
||||
| Dependency | Version | |
||||
| ----------------------- | -------- | |
||||
| Onnxruntime-win-x64-gpu | >=1.14.1 | |
||||
| OpenCV | >=4.0.0 | |
||||
| C++ | >=17 | |
||||
|
||||
Note: The dependency on C++17 is due to the usage of the C++17 filesystem feature. |
||||
|
||||
## Usage |
||||
|
||||
```c++ |
||||
// CPU inference |
||||
DCSP_INIT_PARAM params{ model_path, YOLO_ORIGIN_V8, {imgsz_w, imgsz_h}, class_num, 0.1, 0.5, false}; |
||||
// GPU inference |
||||
DCSP_INIT_PARAM params{ model_path, YOLO_ORIGIN_V8, {imgsz_w, imgsz_h}, class_num, 0.1, 0.5, true}; |
||||
|
||||
// Load your image |
||||
cv::Mat img = cv::imread(img_path); |
||||
|
||||
char* ret = p1->CreateSession(params); |
||||
|
||||
ret = p->RunSession(img, res); |
||||
``` |
||||
|
||||
This repository should also work for YOLOv5, which needs a permute operator for the output of the YOLOv5 model, but this has not been implemented yet. |
||||
@ -0,0 +1,271 @@ |
||||
#include "inference.h" |
||||
#include <regex> |
||||
|
||||
#define benchmark |
||||
#define ELOG |
||||
|
||||
DCSP_CORE::DCSP_CORE() |
||||
{ |
||||
|
||||
} |
||||
|
||||
|
||||
DCSP_CORE::~DCSP_CORE() |
||||
{ |
||||
delete session; |
||||
} |
||||
|
||||
|
||||
template<typename T> |
||||
char* BlobFromImage(cv::Mat& iImg, T& iBlob) |
||||
{ |
||||
int channels = iImg.channels(); |
||||
int imgHeight = iImg.rows; |
||||
int imgWidth = iImg.cols; |
||||
|
||||
for (int c = 0; c < channels; c++) |
||||
{ |
||||
for (int h = 0; h < imgHeight; h++) |
||||
{ |
||||
for (int w = 0; w < imgWidth; w++) |
||||
{ |
||||
iBlob[c * imgWidth * imgHeight + h * imgWidth + w] = (std::remove_pointer<T>::type)((iImg.at<cv::Vec3b>(h, w)[c]) / 255.0f); |
||||
} |
||||
} |
||||
} |
||||
return RET_OK; |
||||
} |
||||
|
||||
|
||||
char* PostProcess(cv::Mat& iImg, std::vector<int> iImgSize, cv::Mat& oImg) |
||||
{ |
||||
cv::Mat img = iImg.clone(); |
||||
cv::resize(iImg, oImg, cv::Size(iImgSize.at(0), iImgSize.at(1))); |
||||
if (img.channels() == 1) |
||||
{ |
||||
cv::cvtColor(oImg, oImg, cv::COLOR_GRAY2BGR); |
||||
} |
||||
cv::cvtColor(oImg, oImg, cv::COLOR_BGR2RGB); |
||||
return RET_OK; |
||||
} |
||||
|
||||
|
||||
char* DCSP_CORE::CreateSession(DCSP_INIT_PARAM &iParams) |
||||
{ |
||||
char* Ret = RET_OK; |
||||
std::regex pattern("[\u4e00-\u9fa5]"); |
||||
bool result = std::regex_search(iParams.ModelPath, pattern); |
||||
if (result) |
||||
{ |
||||
Ret = "[DCSP_ONNX]:model path error.change your model path without chinese characters."; |
||||
std::cout << Ret << std::endl; |
||||
return Ret; |
||||
} |
||||
try |
||||
{ |
||||
rectConfidenceThreshold = iParams.RectConfidenceThreshold; |
||||
iouThreshold = iParams.iouThreshold; |
||||
imgSize = iParams.imgSize; |
||||
modelType = iParams.ModelType; |
||||
env = Ort::Env(ORT_LOGGING_LEVEL_WARNING, "Yolo"); |
||||
Ort::SessionOptions sessionOption; |
||||
if (iParams.CudaEnable) |
||||
{ |
||||
cudaEnable = iParams.CudaEnable; |
||||
OrtCUDAProviderOptions cudaOption; |
||||
cudaOption.device_id = 0; |
||||
sessionOption.AppendExecutionProvider_CUDA(cudaOption); |
||||
//OrtOpenVINOProviderOptions ovOption;
|
||||
//sessionOption.AppendExecutionProvider_OpenVINO(ovOption);
|
||||
} |
||||
sessionOption.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL); |
||||
sessionOption.SetIntraOpNumThreads(iParams.IntraOpNumThreads); |
||||
sessionOption.SetLogSeverityLevel(iParams.LogSeverityLevel); |
||||
int ModelPathSize = MultiByteToWideChar(CP_UTF8, 0, iParams.ModelPath.c_str(), static_cast<int>(iParams.ModelPath.length()), nullptr, 0); |
||||
wchar_t* wide_cstr = new wchar_t[ModelPathSize + 1]; |
||||
MultiByteToWideChar(CP_UTF8, 0, iParams.ModelPath.c_str(), static_cast<int>(iParams.ModelPath.length()), wide_cstr, ModelPathSize); |
||||
wide_cstr[ModelPathSize] = L'\0'; |
||||
const wchar_t* modelPath = wide_cstr; |
||||
session = new Ort::Session(env, modelPath, sessionOption); |
||||
Ort::AllocatorWithDefaultOptions allocator; |
||||
size_t inputNodesNum = session->GetInputCount(); |
||||
for (size_t i = 0; i < inputNodesNum; i++) |
||||
{ |
||||
Ort::AllocatedStringPtr input_node_name = session->GetInputNameAllocated(i, allocator); |
||||
char* temp_buf = new char[50]; |
||||
strcpy(temp_buf, input_node_name.get()); |
||||
inputNodeNames.push_back(temp_buf); |
||||
} |
||||
|
||||
size_t OutputNodesNum = session->GetOutputCount(); |
||||
for (size_t i = 0; i < OutputNodesNum; i++) |
||||
{ |
||||
Ort::AllocatedStringPtr output_node_name = session->GetOutputNameAllocated(i, allocator); |
||||
char* temp_buf = new char[10]; |
||||
strcpy(temp_buf, output_node_name.get()); |
||||
outputNodeNames.push_back(temp_buf); |
||||
} |
||||
options = Ort::RunOptions{ nullptr }; |
||||
WarmUpSession(); |
||||
//std::cout << OrtGetApiBase()->GetVersionString() << std::endl;;
|
||||
Ret = RET_OK; |
||||
return Ret; |
||||
} |
||||
catch (const std::exception& e) |
||||
{ |
||||
const char* str1 = "[DCSP_ONNX]:"; |
||||
const char* str2 = e.what(); |
||||
std::string result = std::string(str1) + std::string(str2); |
||||
char* merged = new char[result.length() + 1]; |
||||
std::strcpy(merged, result.c_str()); |
||||
std::cout << merged << std::endl; |
||||
delete[] merged; |
||||
//return merged;
|
||||
return "[DCSP_ONNX]:Create session failed."; |
||||
} |
||||
|
||||
} |
||||
|
||||
|
||||
char* DCSP_CORE::RunSession(cv::Mat &iImg, std::vector<DCSP_RESULT>& oResult) |
||||
{ |
||||
#ifdef benchmark |
||||
clock_t starttime_1 = clock(); |
||||
#endif // benchmark
|
||||
|
||||
char* Ret = RET_OK; |
||||
cv::Mat processedImg; |
||||
PostProcess(iImg, imgSize, processedImg); |
||||
if (modelType < 4) |
||||
{ |
||||
float* blob = new float[processedImg.total() * 3]; |
||||
BlobFromImage(processedImg, blob); |
||||
std::vector<int64_t> inputNodeDims = { 1,3,imgSize.at(0),imgSize.at(1) }; |
||||
TensorProcess(starttime_1, iImg, blob, inputNodeDims, oResult); |
||||
} |
||||
|
||||
return Ret; |
||||
} |
||||
|
||||
|
||||
template<typename N> |
||||
char* DCSP_CORE::TensorProcess(clock_t& starttime_1, cv::Mat& iImg, N& blob, std::vector<int64_t>& inputNodeDims, std::vector<DCSP_RESULT>& oResult) |
||||
{ |
||||
Ort::Value inputTensor = Ort::Value::CreateTensor<std::remove_pointer<N>::type>(Ort::MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU), blob, 3 * imgSize.at(0) * imgSize.at(1), inputNodeDims.data(), inputNodeDims.size()); |
||||
#ifdef benchmark |
||||
clock_t starttime_2 = clock(); |
||||
#endif // benchmark
|
||||
auto outputTensor = session->Run(options, inputNodeNames.data(), &inputTensor, 1, outputNodeNames.data(), outputNodeNames.size()); |
||||
#ifdef benchmark |
||||
clock_t starttime_3 = clock(); |
||||
#endif // benchmark
|
||||
Ort::TypeInfo typeInfo = outputTensor.front().GetTypeInfo(); |
||||
auto tensor_info = typeInfo.GetTensorTypeAndShapeInfo(); |
||||
std::vector<int64_t>outputNodeDims = tensor_info.GetShape(); |
||||
std::remove_pointer<N>::type* output = outputTensor.front().GetTensorMutableData<std::remove_pointer<N>::type>(); |
||||
delete blob; |
||||
switch (modelType) |
||||
{ |
||||
case 1: |
||||
{ |
||||
int strideNum = outputNodeDims[2]; |
||||
int signalResultNum = outputNodeDims[1]; |
||||
std::vector<int> class_ids; |
||||
std::vector<float> confidences; |
||||
std::vector<cv::Rect> boxes; |
||||
cv::Mat rowData(signalResultNum, strideNum, CV_32F, output); |
||||
rowData = rowData.t(); |
||||
|
||||
float* data = (float*)rowData.data; |
||||
|
||||
float x_factor = iImg.cols / 640.; |
||||
float y_factor = iImg.rows / 640.; |
||||
for (int i = 0; i < strideNum; ++i) |
||||
{ |
||||
float* classesScores = data + 4; |
||||
cv::Mat scores(1, classesNum, CV_32FC1, classesScores); |
||||
cv::Point class_id; |
||||
double maxClassScore; |
||||
cv::minMaxLoc(scores, 0, &maxClassScore, 0, &class_id); |
||||
if (maxClassScore > rectConfidenceThreshold) |
||||
{ |
||||
confidences.push_back(maxClassScore); |
||||
class_ids.push_back(class_id.x); |
||||
|
||||
float x = data[0]; |
||||
float y = data[1]; |
||||
float w = data[2]; |
||||
float h = data[3]; |
||||
|
||||
int left = int((x - 0.5 * w) * x_factor); |
||||
int top = int((y - 0.5 * h) * y_factor); |
||||
|
||||
int width = int(w * x_factor); |
||||
int height = int(h * y_factor); |
||||
|
||||
boxes.push_back(cv::Rect(left, top, width, height)); |
||||
} |
||||
data += signalResultNum; |
||||
} |
||||
|
||||
std::vector<int> nmsResult; |
||||
cv::dnn::NMSBoxes(boxes, confidences, rectConfidenceThreshold, iouThreshold, nmsResult); |
||||
for (int i = 0; i < nmsResult.size(); ++i) |
||||
{ |
||||
int idx = nmsResult[i]; |
||||
DCSP_RESULT result; |
||||
result.classId = class_ids[idx]; |
||||
result.confidence = confidences[idx]; |
||||
result.box = boxes[idx]; |
||||
oResult.push_back(result); |
||||
} |
||||
|
||||
|
||||
#ifdef benchmark |
||||
clock_t starttime_4 = clock(); |
||||
double pre_process_time = (double)(starttime_2 - starttime_1) / CLOCKS_PER_SEC * 1000; |
||||
double process_time = (double)(starttime_3 - starttime_2) / CLOCKS_PER_SEC * 1000; |
||||
double post_process_time = (double)(starttime_4 - starttime_3) / CLOCKS_PER_SEC * 1000; |
||||
if (cudaEnable) |
||||
{ |
||||
std::cout << "[DCSP_ONNX(CUDA)]: " << pre_process_time << "ms pre-process, " << process_time << "ms inference, " << post_process_time << "ms post-process." << std::endl; |
||||
} |
||||
else |
||||
{ |
||||
std::cout << "[DCSP_ONNX(CPU)]: " << pre_process_time << "ms pre-process, " << process_time << "ms inference, " << post_process_time << "ms post-process." << std::endl; |
||||
} |
||||
#endif // benchmark
|
||||
|
||||
break; |
||||
} |
||||
} |
||||
char* Ret = RET_OK; |
||||
return Ret; |
||||
} |
||||
|
||||
|
||||
char* DCSP_CORE::WarmUpSession() |
||||
{ |
||||
clock_t starttime_1 = clock(); |
||||
char* Ret = RET_OK; |
||||
cv::Mat iImg = cv::Mat(cv::Size(imgSize.at(0), imgSize.at(1)), CV_8UC3); |
||||
cv::Mat processedImg; |
||||
PostProcess(iImg, imgSize, processedImg); |
||||
if (modelType < 4) |
||||
{ |
||||
float* blob = new float[iImg.total() * 3]; |
||||
BlobFromImage(processedImg, blob); |
||||
std::vector<int64_t> YOLO_input_node_dims = { 1,3,imgSize.at(0),imgSize.at(1) }; |
||||
Ort::Value input_tensor = Ort::Value::CreateTensor<float>(Ort::MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU), blob, 3 * imgSize.at(0) * imgSize.at(1), YOLO_input_node_dims.data(), YOLO_input_node_dims.size()); |
||||
auto output_tensors = session->Run(options, inputNodeNames.data(), &input_tensor, 1, outputNodeNames.data(), outputNodeNames.size()); |
||||
delete[] blob; |
||||
clock_t starttime_4 = clock(); |
||||
double post_process_time = (double)(starttime_4 - starttime_1) / CLOCKS_PER_SEC * 1000; |
||||
if (cudaEnable) |
||||
{ |
||||
std::cout << "[DCSP_ONNX(CUDA)]: " << "Cuda warm-up cost " << post_process_time << " ms. " << std::endl; |
||||
} |
||||
} |
||||
|
||||
return Ret; |
||||
} |
||||
@ -0,0 +1,83 @@ |
||||
#pragma once |
||||
|
||||
#define _CRT_SECURE_NO_WARNINGS |
||||
#define RET_OK nullptr |
||||
|
||||
#include <string> |
||||
#include <vector> |
||||
#include <stdio.h> |
||||
#include "io.h" |
||||
#include "direct.h" |
||||
#include "opencv.hpp" |
||||
#include <Windows.h> |
||||
#include "onnxruntime_cxx_api.h" |
||||
|
||||
|
||||
enum MODEL_TYPE |
||||
{ |
||||
//FLOAT32 MODEL
|
||||
YOLO_ORIGIN_V5 = 0, |
||||
YOLO_ORIGIN_V8 = 1,//only support v8 detector currently
|
||||
YOLO_POSE_V8 = 2, |
||||
YOLO_CLS_V8 = 3 |
||||
}; |
||||
|
||||
|
||||
typedef struct _DCSP_INIT_PARAM |
||||
{ |
||||
std::string ModelPath; |
||||
MODEL_TYPE ModelType = YOLO_ORIGIN_V8; |
||||
std::vector<int> imgSize={640, 640}; |
||||
|
||||
int classesNum=80; |
||||
float RectConfidenceThreshold = 0.6; |
||||
float iouThreshold = 0.5; |
||||
bool CudaEnable = false; |
||||
int LogSeverityLevel = 3; |
||||
int IntraOpNumThreads = 1; |
||||
}DCSP_INIT_PARAM; |
||||
|
||||
|
||||
typedef struct _DCSP_RESULT |
||||
{ |
||||
int classId; |
||||
float confidence; |
||||
cv::Rect box; |
||||
}DCSP_RESULT; |
||||
|
||||
|
||||
class DCSP_CORE |
||||
{ |
||||
public: |
||||
DCSP_CORE(); |
||||
~DCSP_CORE(); |
||||
|
||||
public: |
||||
char* CreateSession(DCSP_INIT_PARAM &iParams); |
||||
|
||||
|
||||
char* RunSession(cv::Mat &iImg, std::vector<DCSP_RESULT>& oResult); |
||||
|
||||
|
||||
char* WarmUpSession(); |
||||
|
||||
|
||||
template<typename N> |
||||
char* TensorProcess(clock_t& starttime_1, cv::Mat& iImg, N& blob, std::vector<int64_t>& inputNodeDims, std::vector<DCSP_RESULT>& oResult); |
||||
|
||||
|
||||
private: |
||||
Ort::Env env; |
||||
Ort::Session* session; |
||||
bool cudaEnable; |
||||
Ort::RunOptions options; |
||||
std::vector<const char*> inputNodeNames; |
||||
std::vector<const char*> outputNodeNames; |
||||
|
||||
|
||||
int classesNum; |
||||
MODEL_TYPE modelType; |
||||
std::vector<int> imgSize; |
||||
float rectConfidenceThreshold; |
||||
float iouThreshold; |
||||
}; |
||||
@ -0,0 +1,44 @@ |
||||
#include <iostream> |
||||
#include <stdio.h> |
||||
#include "inference.h" |
||||
#include <filesystem> |
||||
|
||||
|
||||
|
||||
void file_iterator(DCSP_CORE*& p) |
||||
{ |
||||
std::filesystem::path img_path = R"(E:\project\Project_C++\DCPS_ONNX\TEST_ORIGIN)"; |
||||
int k = 0; |
||||
for (auto& i : std::filesystem::directory_iterator(img_path)) |
||||
{ |
||||
if (i.path().extension() == ".jpg") |
||||
{ |
||||
std::string img_path = i.path().string(); |
||||
//std::cout << img_path << std::endl;
|
||||
cv::Mat img = cv::imread(img_path); |
||||
std::vector<DCSP_RESULT> res; |
||||
char* ret = p->RunSession(img, res); |
||||
for (int i = 0; i < res.size(); i++) |
||||
{ |
||||
cv::rectangle(img, res.at(i).box, cv::Scalar(125, 123, 0), 3); |
||||
} |
||||
|
||||
k++; |
||||
cv::imshow("TEST_ORIGIN", img); |
||||
cv::waitKey(0); |
||||
cv::destroyAllWindows(); |
||||
//cv::imwrite("E:\\output\\" + std::to_string(k) + ".png", img);
|
||||
} |
||||
} |
||||
} |
||||
|
||||
|
||||
|
||||
int main() |
||||
{ |
||||
DCSP_CORE* p1 = new DCSP_CORE; |
||||
std::string model_path = "yolov8n.onnx"; |
||||
DCSP_INIT_PARAM params{ model_path, YOLO_ORIGIN_V8, {640, 640}, 80, 0.1, 0.5, false }; |
||||
char* ret = p1->CreateSession(params); |
||||
file_iterator(p1); |
||||
} |
||||
@ -1,12 +1,14 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
__version__ = '8.0.118' |
||||
__version__ = '8.0.132' |
||||
|
||||
from ultralytics.hub import start |
||||
from ultralytics.vit.rtdetr import RTDETR |
||||
from ultralytics.vit.sam import SAM |
||||
from ultralytics.yolo.engine.model import YOLO |
||||
from ultralytics.yolo.fastsam import FastSAM |
||||
from ultralytics.yolo.nas import NAS |
||||
from ultralytics.yolo.utils.checks import check_yolo as checks |
||||
from ultralytics.yolo.utils.downloads import download |
||||
|
||||
__all__ = '__version__', 'YOLO', 'NAS', 'SAM', 'RTDETR', 'checks', 'start' # allow simpler import |
||||
__all__ = '__version__', 'YOLO', 'NAS', 'SAM', 'FastSAM', 'RTDETR', 'checks', 'download', 'start' # allow simpler import |
||||
|
||||
@ -0,0 +1,8 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
from .model import FastSAM |
||||
from .predict import FastSAMPredictor |
||||
from .prompt import FastSAMPrompt |
||||
from .val import FastSAMValidator |
||||
|
||||
__all__ = 'FastSAMPredictor', 'FastSAM', 'FastSAMPrompt', 'FastSAMValidator' |
||||
@ -0,0 +1,53 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
import torch |
||||
|
||||
from ultralytics.yolo.engine.results import Results |
||||
from ultralytics.yolo.fastsam.utils import bbox_iou |
||||
from ultralytics.yolo.utils import DEFAULT_CFG, ops |
||||
from ultralytics.yolo.v8.detect.predict import DetectionPredictor |
||||
|
||||
|
||||
class FastSAMPredictor(DetectionPredictor): |
||||
|
||||
def __init__(self, cfg=DEFAULT_CFG, overrides=None, _callbacks=None): |
||||
super().__init__(cfg, overrides, _callbacks) |
||||
self.args.task = 'segment' |
||||
|
||||
def postprocess(self, preds, img, orig_imgs): |
||||
"""TODO: filter by classes.""" |
||||
p = ops.non_max_suppression(preds[0], |
||||
self.args.conf, |
||||
self.args.iou, |
||||
agnostic=self.args.agnostic_nms, |
||||
max_det=self.args.max_det, |
||||
nc=len(self.model.names), |
||||
classes=self.args.classes) |
||||
full_box = torch.zeros_like(p[0][0]) |
||||
full_box[2], full_box[3], full_box[4], full_box[6:] = img.shape[3], img.shape[2], 1.0, 1.0 |
||||
full_box = full_box.view(1, -1) |
||||
critical_iou_index = bbox_iou(full_box[0][:4], p[0][:, :4], iou_thres=0.9, image_shape=img.shape[2:]) |
||||
if critical_iou_index.numel() != 0: |
||||
full_box[0][4] = p[0][critical_iou_index][:, 4] |
||||
full_box[0][6:] = p[0][critical_iou_index][:, 6:] |
||||
p[0][critical_iou_index] = full_box |
||||
results = [] |
||||
proto = preds[1][-1] if len(preds[1]) == 3 else preds[1] # second output is len 3 if pt, but only 1 if exported |
||||
for i, pred in enumerate(p): |
||||
orig_img = orig_imgs[i] if isinstance(orig_imgs, list) else orig_imgs |
||||
path = self.batch[0] |
||||
img_path = path[i] if isinstance(path, list) else path |
||||
if not len(pred): # save empty boxes |
||||
results.append(Results(orig_img=orig_img, path=img_path, names=self.model.names, boxes=pred[:, :6])) |
||||
continue |
||||
if self.args.retina_masks: |
||||
if not isinstance(orig_imgs, torch.Tensor): |
||||
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], orig_img.shape) |
||||
masks = ops.process_mask_native(proto[i], pred[:, 6:], pred[:, :4], orig_img.shape[:2]) # HWC |
||||
else: |
||||
masks = ops.process_mask(proto[i], pred[:, 6:], pred[:, :4], img.shape[2:], upsample=True) # HWC |
||||
if not isinstance(orig_imgs, torch.Tensor): |
||||
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], orig_img.shape) |
||||
results.append( |
||||
Results(orig_img=orig_img, path=img_path, names=self.model.names, boxes=pred[:, :6], masks=masks)) |
||||
return results |
||||
@ -0,0 +1,406 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
import os |
||||
|
||||
import cv2 |
||||
import matplotlib.pyplot as plt |
||||
import numpy as np |
||||
import torch |
||||
from PIL import Image |
||||
|
||||
|
||||
class FastSAMPrompt: |
||||
|
||||
def __init__(self, img_path, results, device='cuda') -> None: |
||||
# self.img_path = img_path |
||||
self.device = device |
||||
self.results = results |
||||
self.img_path = img_path |
||||
self.ori_img = cv2.imread(img_path) |
||||
|
||||
# Import and assign clip |
||||
try: |
||||
import clip # for linear_assignment |
||||
except ImportError: |
||||
from ultralytics.yolo.utils.checks import check_requirements |
||||
check_requirements('git+https://github.com/openai/CLIP.git') # required before installing lap from source |
||||
import clip |
||||
self.clip = clip |
||||
|
||||
@staticmethod |
||||
def _segment_image(image, bbox): |
||||
image_array = np.array(image) |
||||
segmented_image_array = np.zeros_like(image_array) |
||||
x1, y1, x2, y2 = bbox |
||||
segmented_image_array[y1:y2, x1:x2] = image_array[y1:y2, x1:x2] |
||||
segmented_image = Image.fromarray(segmented_image_array) |
||||
black_image = Image.new('RGB', image.size, (255, 255, 255)) |
||||
# transparency_mask = np.zeros_like((), dtype=np.uint8) |
||||
transparency_mask = np.zeros((image_array.shape[0], image_array.shape[1]), dtype=np.uint8) |
||||
transparency_mask[y1:y2, x1:x2] = 255 |
||||
transparency_mask_image = Image.fromarray(transparency_mask, mode='L') |
||||
black_image.paste(segmented_image, mask=transparency_mask_image) |
||||
return black_image |
||||
|
||||
@staticmethod |
||||
def _format_results(result, filter=0): |
||||
annotations = [] |
||||
n = len(result.masks.data) |
||||
for i in range(n): |
||||
mask = result.masks.data[i] == 1.0 |
||||
|
||||
if torch.sum(mask) < filter: |
||||
continue |
||||
annotation = { |
||||
'id': i, |
||||
'segmentation': mask.cpu().numpy(), |
||||
'bbox': result.boxes.data[i], |
||||
'score': result.boxes.conf[i]} |
||||
annotation['area'] = annotation['segmentation'].sum() |
||||
annotations.append(annotation) |
||||
return annotations |
||||
|
||||
@staticmethod |
||||
def filter_masks(annotations): # filter the overlap mask |
||||
annotations.sort(key=lambda x: x['area'], reverse=True) |
||||
to_remove = set() |
||||
for i in range(len(annotations)): |
||||
a = annotations[i] |
||||
for j in range(i + 1, len(annotations)): |
||||
b = annotations[j] |
||||
if i != j and j not in to_remove and b['area'] < a['area'] and \ |
||||
(a['segmentation'] & b['segmentation']).sum() / b['segmentation'].sum() > 0.8: |
||||
to_remove.add(j) |
||||
|
||||
return [a for i, a in enumerate(annotations) if i not in to_remove], to_remove |
||||
|
||||
@staticmethod |
||||
def _get_bbox_from_mask(mask): |
||||
mask = mask.astype(np.uint8) |
||||
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) |
||||
x1, y1, w, h = cv2.boundingRect(contours[0]) |
||||
x2, y2 = x1 + w, y1 + h |
||||
if len(contours) > 1: |
||||
for b in contours: |
||||
x_t, y_t, w_t, h_t = cv2.boundingRect(b) |
||||
# 将多个bbox合并成一个 |
||||
x1 = min(x1, x_t) |
||||
y1 = min(y1, y_t) |
||||
x2 = max(x2, x_t + w_t) |
||||
y2 = max(y2, y_t + h_t) |
||||
h = y2 - y1 |
||||
w = x2 - x1 |
||||
return [x1, y1, x2, y2] |
||||
|
||||
def plot(self, |
||||
annotations, |
||||
output, |
||||
bbox=None, |
||||
points=None, |
||||
point_label=None, |
||||
mask_random_color=True, |
||||
better_quality=True, |
||||
retina=False, |
||||
withContours=True): |
||||
if isinstance(annotations[0], dict): |
||||
annotations = [annotation['segmentation'] for annotation in annotations] |
||||
result_name = os.path.basename(self.img_path) |
||||
image = self.ori_img |
||||
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) |
||||
original_h = image.shape[0] |
||||
original_w = image.shape[1] |
||||
# for macOS only |
||||
# plt.switch_backend('TkAgg') |
||||
plt.figure(figsize=(original_w / 100, original_h / 100)) |
||||
# Add subplot with no margin. |
||||
plt.subplots_adjust(top=1, bottom=0, right=1, left=0, hspace=0, wspace=0) |
||||
plt.margins(0, 0) |
||||
plt.gca().xaxis.set_major_locator(plt.NullLocator()) |
||||
plt.gca().yaxis.set_major_locator(plt.NullLocator()) |
||||
|
||||
plt.imshow(image) |
||||
if better_quality: |
||||
if isinstance(annotations[0], torch.Tensor): |
||||
annotations = np.array(annotations.cpu()) |
||||
for i, mask in enumerate(annotations): |
||||
mask = cv2.morphologyEx(mask.astype(np.uint8), cv2.MORPH_CLOSE, np.ones((3, 3), np.uint8)) |
||||
annotations[i] = cv2.morphologyEx(mask.astype(np.uint8), cv2.MORPH_OPEN, np.ones((8, 8), np.uint8)) |
||||
if self.device == 'cpu': |
||||
annotations = np.array(annotations) |
||||
self.fast_show_mask( |
||||
annotations, |
||||
plt.gca(), |
||||
random_color=mask_random_color, |
||||
bbox=bbox, |
||||
points=points, |
||||
pointlabel=point_label, |
||||
retinamask=retina, |
||||
target_height=original_h, |
||||
target_width=original_w, |
||||
) |
||||
else: |
||||
if isinstance(annotations[0], np.ndarray): |
||||
annotations = torch.from_numpy(annotations) |
||||
self.fast_show_mask_gpu( |
||||
annotations, |
||||
plt.gca(), |
||||
random_color=mask_random_color, |
||||
bbox=bbox, |
||||
points=points, |
||||
pointlabel=point_label, |
||||
retinamask=retina, |
||||
target_height=original_h, |
||||
target_width=original_w, |
||||
) |
||||
if isinstance(annotations, torch.Tensor): |
||||
annotations = annotations.cpu().numpy() |
||||
if withContours: |
||||
contour_all = [] |
||||
temp = np.zeros((original_h, original_w, 1)) |
||||
for i, mask in enumerate(annotations): |
||||
if type(mask) == dict: |
||||
mask = mask['segmentation'] |
||||
annotation = mask.astype(np.uint8) |
||||
if not retina: |
||||
annotation = cv2.resize( |
||||
annotation, |
||||
(original_w, original_h), |
||||
interpolation=cv2.INTER_NEAREST, |
||||
) |
||||
contours, hierarchy = cv2.findContours(annotation, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) |
||||
contour_all.extend(iter(contours)) |
||||
cv2.drawContours(temp, contour_all, -1, (255, 255, 255), 2) |
||||
color = np.array([0 / 255, 0 / 255, 1.0, 0.8]) |
||||
contour_mask = temp / 255 * color.reshape(1, 1, -1) |
||||
plt.imshow(contour_mask) |
||||
|
||||
save_path = output |
||||
if not os.path.exists(save_path): |
||||
os.makedirs(save_path) |
||||
plt.axis('off') |
||||
fig = plt.gcf() |
||||
plt.draw() |
||||
|
||||
try: |
||||
buf = fig.canvas.tostring_rgb() |
||||
except AttributeError: |
||||
fig.canvas.draw() |
||||
buf = fig.canvas.tostring_rgb() |
||||
cols, rows = fig.canvas.get_width_height() |
||||
img_array = np.frombuffer(buf, dtype=np.uint8).reshape(rows, cols, 3) |
||||
cv2.imwrite(os.path.join(save_path, result_name), cv2.cvtColor(img_array, cv2.COLOR_RGB2BGR)) |
||||
|
||||
# CPU post process |
||||
def fast_show_mask( |
||||
self, |
||||
annotation, |
||||
ax, |
||||
random_color=False, |
||||
bbox=None, |
||||
points=None, |
||||
pointlabel=None, |
||||
retinamask=True, |
||||
target_height=960, |
||||
target_width=960, |
||||
): |
||||
msak_sum = annotation.shape[0] |
||||
height = annotation.shape[1] |
||||
weight = annotation.shape[2] |
||||
# 将annotation 按照面积 排序 |
||||
areas = np.sum(annotation, axis=(1, 2)) |
||||
sorted_indices = np.argsort(areas) |
||||
annotation = annotation[sorted_indices] |
||||
|
||||
index = (annotation != 0).argmax(axis=0) |
||||
if random_color: |
||||
color = np.random.random((msak_sum, 1, 1, 3)) |
||||
else: |
||||
color = np.ones((msak_sum, 1, 1, 3)) * np.array([30 / 255, 144 / 255, 1.0]) |
||||
transparency = np.ones((msak_sum, 1, 1, 1)) * 0.6 |
||||
visual = np.concatenate([color, transparency], axis=-1) |
||||
mask_image = np.expand_dims(annotation, -1) * visual |
||||
|
||||
show = np.zeros((height, weight, 4)) |
||||
h_indices, w_indices = np.meshgrid(np.arange(height), np.arange(weight), indexing='ij') |
||||
indices = (index[h_indices, w_indices], h_indices, w_indices, slice(None)) |
||||
# 使用向量化索引更新show的值 |
||||
show[h_indices, w_indices, :] = mask_image[indices] |
||||
if bbox is not None: |
||||
x1, y1, x2, y2 = bbox |
||||
ax.add_patch(plt.Rectangle((x1, y1), x2 - x1, y2 - y1, fill=False, edgecolor='b', linewidth=1)) |
||||
# draw point |
||||
if points is not None: |
||||
plt.scatter( |
||||
[point[0] for i, point in enumerate(points) if pointlabel[i] == 1], |
||||
[point[1] for i, point in enumerate(points) if pointlabel[i] == 1], |
||||
s=20, |
||||
c='y', |
||||
) |
||||
plt.scatter( |
||||
[point[0] for i, point in enumerate(points) if pointlabel[i] == 0], |
||||
[point[1] for i, point in enumerate(points) if pointlabel[i] == 0], |
||||
s=20, |
||||
c='m', |
||||
) |
||||
|
||||
if not retinamask: |
||||
show = cv2.resize(show, (target_width, target_height), interpolation=cv2.INTER_NEAREST) |
||||
ax.imshow(show) |
||||
|
||||
def fast_show_mask_gpu( |
||||
self, |
||||
annotation, |
||||
ax, |
||||
random_color=False, |
||||
bbox=None, |
||||
points=None, |
||||
pointlabel=None, |
||||
retinamask=True, |
||||
target_height=960, |
||||
target_width=960, |
||||
): |
||||
msak_sum = annotation.shape[0] |
||||
height = annotation.shape[1] |
||||
weight = annotation.shape[2] |
||||
areas = torch.sum(annotation, dim=(1, 2)) |
||||
sorted_indices = torch.argsort(areas, descending=False) |
||||
annotation = annotation[sorted_indices] |
||||
# 找每个位置第一个非零值下标 |
||||
index = (annotation != 0).to(torch.long).argmax(dim=0) |
||||
if random_color: |
||||
color = torch.rand((msak_sum, 1, 1, 3)).to(annotation.device) |
||||
else: |
||||
color = torch.ones((msak_sum, 1, 1, 3)).to(annotation.device) * torch.tensor([30 / 255, 144 / 255, 1.0]).to( |
||||
annotation.device) |
||||
transparency = torch.ones((msak_sum, 1, 1, 1)).to(annotation.device) * 0.6 |
||||
visual = torch.cat([color, transparency], dim=-1) |
||||
mask_image = torch.unsqueeze(annotation, -1) * visual |
||||
# 按index取数,index指每个位置选哪个batch的数,把mask_image转成一个batch的形式 |
||||
show = torch.zeros((height, weight, 4)).to(annotation.device) |
||||
h_indices, w_indices = torch.meshgrid(torch.arange(height), torch.arange(weight), indexing='ij') |
||||
indices = (index[h_indices, w_indices], h_indices, w_indices, slice(None)) |
||||
# 使用向量化索引更新show的值 |
||||
show[h_indices, w_indices, :] = mask_image[indices] |
||||
show_cpu = show.cpu().numpy() |
||||
if bbox is not None: |
||||
x1, y1, x2, y2 = bbox |
||||
ax.add_patch(plt.Rectangle((x1, y1), x2 - x1, y2 - y1, fill=False, edgecolor='b', linewidth=1)) |
||||
# draw point |
||||
if points is not None: |
||||
plt.scatter( |
||||
[point[0] for i, point in enumerate(points) if pointlabel[i] == 1], |
||||
[point[1] for i, point in enumerate(points) if pointlabel[i] == 1], |
||||
s=20, |
||||
c='y', |
||||
) |
||||
plt.scatter( |
||||
[point[0] for i, point in enumerate(points) if pointlabel[i] == 0], |
||||
[point[1] for i, point in enumerate(points) if pointlabel[i] == 0], |
||||
s=20, |
||||
c='m', |
||||
) |
||||
if not retinamask: |
||||
show_cpu = cv2.resize(show_cpu, (target_width, target_height), interpolation=cv2.INTER_NEAREST) |
||||
ax.imshow(show_cpu) |
||||
|
||||
# clip |
||||
@torch.no_grad() |
||||
def retrieve(self, model, preprocess, elements, search_text: str, device) -> int: |
||||
preprocessed_images = [preprocess(image).to(device) for image in elements] |
||||
tokenized_text = self.clip.tokenize([search_text]).to(device) |
||||
stacked_images = torch.stack(preprocessed_images) |
||||
image_features = model.encode_image(stacked_images) |
||||
text_features = model.encode_text(tokenized_text) |
||||
image_features /= image_features.norm(dim=-1, keepdim=True) |
||||
text_features /= text_features.norm(dim=-1, keepdim=True) |
||||
probs = 100.0 * image_features @ text_features.T |
||||
return probs[:, 0].softmax(dim=0) |
||||
|
||||
def _crop_image(self, format_results): |
||||
|
||||
image = Image.fromarray(cv2.cvtColor(self.ori_img, cv2.COLOR_BGR2RGB)) |
||||
ori_w, ori_h = image.size |
||||
annotations = format_results |
||||
mask_h, mask_w = annotations[0]['segmentation'].shape |
||||
if ori_w != mask_w or ori_h != mask_h: |
||||
image = image.resize((mask_w, mask_h)) |
||||
cropped_boxes = [] |
||||
cropped_images = [] |
||||
not_crop = [] |
||||
filter_id = [] |
||||
# annotations, _ = filter_masks(annotations) |
||||
# filter_id = list(_) |
||||
for _, mask in enumerate(annotations): |
||||
if np.sum(mask['segmentation']) <= 100: |
||||
filter_id.append(_) |
||||
continue |
||||
bbox = self._get_bbox_from_mask(mask['segmentation']) # mask 的 bbox |
||||
cropped_boxes.append(self._segment_image(image, bbox)) # 保存裁剪的图片 |
||||
# cropped_boxes.append(segment_image(image,mask["segmentation"])) |
||||
cropped_images.append(bbox) # 保存裁剪的图片的bbox |
||||
|
||||
return cropped_boxes, cropped_images, not_crop, filter_id, annotations |
||||
|
||||
def box_prompt(self, bbox): |
||||
|
||||
assert (bbox[2] != 0 and bbox[3] != 0) |
||||
masks = self.results[0].masks.data |
||||
target_height = self.ori_img.shape[0] |
||||
target_width = self.ori_img.shape[1] |
||||
h = masks.shape[1] |
||||
w = masks.shape[2] |
||||
if h != target_height or w != target_width: |
||||
bbox = [ |
||||
int(bbox[0] * w / target_width), |
||||
int(bbox[1] * h / target_height), |
||||
int(bbox[2] * w / target_width), |
||||
int(bbox[3] * h / target_height), ] |
||||
bbox[0] = max(round(bbox[0]), 0) |
||||
bbox[1] = max(round(bbox[1]), 0) |
||||
bbox[2] = min(round(bbox[2]), w) |
||||
bbox[3] = min(round(bbox[3]), h) |
||||
|
||||
# IoUs = torch.zeros(len(masks), dtype=torch.float32) |
||||
bbox_area = (bbox[3] - bbox[1]) * (bbox[2] - bbox[0]) |
||||
|
||||
masks_area = torch.sum(masks[:, bbox[1]:bbox[3], bbox[0]:bbox[2]], dim=(1, 2)) |
||||
orig_masks_area = torch.sum(masks, dim=(1, 2)) |
||||
|
||||
union = bbox_area + orig_masks_area - masks_area |
||||
IoUs = masks_area / union |
||||
max_iou_index = torch.argmax(IoUs) |
||||
|
||||
return np.array([masks[max_iou_index].cpu().numpy()]) |
||||
|
||||
def point_prompt(self, points, pointlabel): # numpy 处理 |
||||
|
||||
masks = self._format_results(self.results[0], 0) |
||||
target_height = self.ori_img.shape[0] |
||||
target_width = self.ori_img.shape[1] |
||||
h = masks[0]['segmentation'].shape[0] |
||||
w = masks[0]['segmentation'].shape[1] |
||||
if h != target_height or w != target_width: |
||||
points = [[int(point[0] * w / target_width), int(point[1] * h / target_height)] for point in points] |
||||
onemask = np.zeros((h, w)) |
||||
for i, annotation in enumerate(masks): |
||||
mask = annotation['segmentation'] if type(annotation) == dict else annotation |
||||
for i, point in enumerate(points): |
||||
if mask[point[1], point[0]] == 1 and pointlabel[i] == 1: |
||||
onemask += mask |
||||
if mask[point[1], point[0]] == 1 and pointlabel[i] == 0: |
||||
onemask -= mask |
||||
onemask = onemask >= 1 |
||||
return np.array([onemask]) |
||||
|
||||
def text_prompt(self, text): |
||||
format_results = self._format_results(self.results[0], 0) |
||||
cropped_boxes, cropped_images, not_crop, filter_id, annotations = self._crop_image(format_results) |
||||
clip_model, preprocess = self.clip.load('ViT-B/32', device=self.device) |
||||
scores = self.retrieve(clip_model, preprocess, cropped_boxes, text, device=self.device) |
||||
max_idx = scores.argsort() |
||||
max_idx = max_idx[-1] |
||||
max_idx += sum(np.array(filter_id) <= int(max_idx)) |
||||
return np.array([annotations[max_idx]['segmentation']]) |
||||
|
||||
def everything_prompt(self): |
||||
return self.results[0].masks.data |
||||
@ -0,0 +1,64 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
import torch |
||||
|
||||
|
||||
def adjust_bboxes_to_image_border(boxes, image_shape, threshold=20): |
||||
""" |
||||
Adjust bounding boxes to stick to image border if they are within a certain threshold. |
||||
|
||||
Args: |
||||
boxes: (n, 4) |
||||
image_shape: (height, width) |
||||
threshold: pixel threshold |
||||
|
||||
Returns: |
||||
adjusted_boxes: adjusted bounding boxes |
||||
""" |
||||
|
||||
# Image dimensions |
||||
h, w = image_shape |
||||
|
||||
# Adjust boxes |
||||
boxes[boxes[:, 0] < threshold, 0] = 0 # x1 |
||||
boxes[boxes[:, 1] < threshold, 1] = 0 # y1 |
||||
boxes[boxes[:, 2] > w - threshold, 2] = w # x2 |
||||
boxes[boxes[:, 3] > h - threshold, 3] = h # y2 |
||||
return boxes |
||||
|
||||
|
||||
def bbox_iou(box1, boxes, iou_thres=0.9, image_shape=(640, 640), raw_output=False): |
||||
""" |
||||
Compute the Intersection-Over-Union of a bounding box with respect to an array of other bounding boxes. |
||||
|
||||
Args: |
||||
box1: (4, ) |
||||
boxes: (n, 4) |
||||
|
||||
Returns: |
||||
high_iou_indices: Indices of boxes with IoU > thres |
||||
""" |
||||
boxes = adjust_bboxes_to_image_border(boxes, image_shape) |
||||
# obtain coordinates for intersections |
||||
x1 = torch.max(box1[0], boxes[:, 0]) |
||||
y1 = torch.max(box1[1], boxes[:, 1]) |
||||
x2 = torch.min(box1[2], boxes[:, 2]) |
||||
y2 = torch.min(box1[3], boxes[:, 3]) |
||||
|
||||
# compute the area of intersection |
||||
intersection = (x2 - x1).clamp(0) * (y2 - y1).clamp(0) |
||||
|
||||
# compute the area of both individual boxes |
||||
box1_area = (box1[2] - box1[0]) * (box1[3] - box1[1]) |
||||
box2_area = (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]) |
||||
|
||||
# compute the area of union |
||||
union = box1_area + box2_area - intersection |
||||
|
||||
# compute the IoU |
||||
iou = intersection / union # Should be shape (n, ) |
||||
if raw_output: |
||||
return 0 if iou.numel() == 0 else iou |
||||
|
||||
# return indices of boxes with IoU > thres |
||||
return torch.nonzero(iou > iou_thres).flatten() |
||||
@ -0,0 +1,244 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
|
||||
from multiprocessing.pool import ThreadPool |
||||
from pathlib import Path |
||||
|
||||
import numpy as np |
||||
import torch |
||||
import torch.nn.functional as F |
||||
|
||||
from ultralytics.yolo.utils import LOGGER, NUM_THREADS, ops |
||||
from ultralytics.yolo.utils.checks import check_requirements |
||||
from ultralytics.yolo.utils.metrics import SegmentMetrics, box_iou, mask_iou |
||||
from ultralytics.yolo.utils.plotting import output_to_target, plot_images |
||||
from ultralytics.yolo.v8.detect import DetectionValidator |
||||
|
||||
|
||||
class FastSAMValidator(DetectionValidator): |
||||
|
||||
def __init__(self, dataloader=None, save_dir=None, pbar=None, args=None, _callbacks=None): |
||||
"""Initialize SegmentationValidator and set task to 'segment', metrics to SegmentMetrics.""" |
||||
super().__init__(dataloader, save_dir, pbar, args, _callbacks) |
||||
self.args.task = 'segment' |
||||
self.metrics = SegmentMetrics(save_dir=self.save_dir, on_plot=self.on_plot) |
||||
|
||||
def preprocess(self, batch): |
||||
"""Preprocesses batch by converting masks to float and sending to device.""" |
||||
batch = super().preprocess(batch) |
||||
batch['masks'] = batch['masks'].to(self.device).float() |
||||
return batch |
||||
|
||||
def init_metrics(self, model): |
||||
"""Initialize metrics and select mask processing function based on save_json flag.""" |
||||
super().init_metrics(model) |
||||
self.plot_masks = [] |
||||
if self.args.save_json: |
||||
check_requirements('pycocotools>=2.0.6') |
||||
self.process = ops.process_mask_upsample # more accurate |
||||
else: |
||||
self.process = ops.process_mask # faster |
||||
|
||||
def get_desc(self): |
||||
"""Return a formatted description of evaluation metrics.""" |
||||
return ('%22s' + '%11s' * 10) % ('Class', 'Images', 'Instances', 'Box(P', 'R', 'mAP50', 'mAP50-95)', 'Mask(P', |
||||
'R', 'mAP50', 'mAP50-95)') |
||||
|
||||
def postprocess(self, preds): |
||||
"""Postprocesses YOLO predictions and returns output detections with proto.""" |
||||
p = ops.non_max_suppression(preds[0], |
||||
self.args.conf, |
||||
self.args.iou, |
||||
labels=self.lb, |
||||
multi_label=True, |
||||
agnostic=self.args.single_cls, |
||||
max_det=self.args.max_det, |
||||
nc=self.nc) |
||||
proto = preds[1][-1] if len(preds[1]) == 3 else preds[1] # second output is len 3 if pt, but only 1 if exported |
||||
return p, proto |
||||
|
||||
def update_metrics(self, preds, batch): |
||||
"""Metrics.""" |
||||
for si, (pred, proto) in enumerate(zip(preds[0], preds[1])): |
||||
idx = batch['batch_idx'] == si |
||||
cls = batch['cls'][idx] |
||||
bbox = batch['bboxes'][idx] |
||||
nl, npr = cls.shape[0], pred.shape[0] # number of labels, predictions |
||||
shape = batch['ori_shape'][si] |
||||
correct_masks = torch.zeros(npr, self.niou, dtype=torch.bool, device=self.device) # init |
||||
correct_bboxes = torch.zeros(npr, self.niou, dtype=torch.bool, device=self.device) # init |
||||
self.seen += 1 |
||||
|
||||
if npr == 0: |
||||
if nl: |
||||
self.stats.append((correct_bboxes, correct_masks, *torch.zeros( |
||||
(2, 0), device=self.device), cls.squeeze(-1))) |
||||
if self.args.plots: |
||||
self.confusion_matrix.process_batch(detections=None, labels=cls.squeeze(-1)) |
||||
continue |
||||
|
||||
# Masks |
||||
midx = [si] if self.args.overlap_mask else idx |
||||
gt_masks = batch['masks'][midx] |
||||
pred_masks = self.process(proto, pred[:, 6:], pred[:, :4], shape=batch['img'][si].shape[1:]) |
||||
|
||||
# Predictions |
||||
if self.args.single_cls: |
||||
pred[:, 5] = 0 |
||||
predn = pred.clone() |
||||
ops.scale_boxes(batch['img'][si].shape[1:], predn[:, :4], shape, |
||||
ratio_pad=batch['ratio_pad'][si]) # native-space pred |
||||
|
||||
# Evaluate |
||||
if nl: |
||||
height, width = batch['img'].shape[2:] |
||||
tbox = ops.xywh2xyxy(bbox) * torch.tensor( |
||||
(width, height, width, height), device=self.device) # target boxes |
||||
ops.scale_boxes(batch['img'][si].shape[1:], tbox, shape, |
||||
ratio_pad=batch['ratio_pad'][si]) # native-space labels |
||||
labelsn = torch.cat((cls, tbox), 1) # native-space labels |
||||
correct_bboxes = self._process_batch(predn, labelsn) |
||||
# TODO: maybe remove these `self.` arguments as they already are member variable |
||||
correct_masks = self._process_batch(predn, |
||||
labelsn, |
||||
pred_masks, |
||||
gt_masks, |
||||
overlap=self.args.overlap_mask, |
||||
masks=True) |
||||
if self.args.plots: |
||||
self.confusion_matrix.process_batch(predn, labelsn) |
||||
|
||||
# Append correct_masks, correct_boxes, pconf, pcls, tcls |
||||
self.stats.append((correct_bboxes, correct_masks, pred[:, 4], pred[:, 5], cls.squeeze(-1))) |
||||
|
||||
pred_masks = torch.as_tensor(pred_masks, dtype=torch.uint8) |
||||
if self.args.plots and self.batch_i < 3: |
||||
self.plot_masks.append(pred_masks[:15].cpu()) # filter top 15 to plot |
||||
|
||||
# Save |
||||
if self.args.save_json: |
||||
pred_masks = ops.scale_image(pred_masks.permute(1, 2, 0).contiguous().cpu().numpy(), |
||||
shape, |
||||
ratio_pad=batch['ratio_pad'][si]) |
||||
self.pred_to_json(predn, batch['im_file'][si], pred_masks) |
||||
# if self.args.save_txt: |
||||
# save_one_txt(predn, save_conf, shape, file=save_dir / 'labels' / f'{path.stem}.txt') |
||||
|
||||
def finalize_metrics(self, *args, **kwargs): |
||||
"""Sets speed and confusion matrix for evaluation metrics.""" |
||||
self.metrics.speed = self.speed |
||||
self.metrics.confusion_matrix = self.confusion_matrix |
||||
|
||||
def _process_batch(self, detections, labels, pred_masks=None, gt_masks=None, overlap=False, masks=False): |
||||
""" |
||||
Return correct prediction matrix |
||||
Arguments: |
||||
detections (array[N, 6]), x1, y1, x2, y2, conf, class |
||||
labels (array[M, 5]), class, x1, y1, x2, y2 |
||||
Returns: |
||||
correct (array[N, 10]), for 10 IoU levels |
||||
""" |
||||
if masks: |
||||
if overlap: |
||||
nl = len(labels) |
||||
index = torch.arange(nl, device=gt_masks.device).view(nl, 1, 1) + 1 |
||||
gt_masks = gt_masks.repeat(nl, 1, 1) # shape(1,640,640) -> (n,640,640) |
||||
gt_masks = torch.where(gt_masks == index, 1.0, 0.0) |
||||
if gt_masks.shape[1:] != pred_masks.shape[1:]: |
||||
gt_masks = F.interpolate(gt_masks[None], pred_masks.shape[1:], mode='bilinear', align_corners=False)[0] |
||||
gt_masks = gt_masks.gt_(0.5) |
||||
iou = mask_iou(gt_masks.view(gt_masks.shape[0], -1), pred_masks.view(pred_masks.shape[0], -1)) |
||||
else: # boxes |
||||
iou = box_iou(labels[:, 1:], detections[:, :4]) |
||||
|
||||
correct = np.zeros((detections.shape[0], self.iouv.shape[0])).astype(bool) |
||||
correct_class = labels[:, 0:1] == detections[:, 5] |
||||
for i in range(len(self.iouv)): |
||||
x = torch.where((iou >= self.iouv[i]) & correct_class) # IoU > threshold and classes match |
||||
if x[0].shape[0]: |
||||
matches = torch.cat((torch.stack(x, 1), iou[x[0], x[1]][:, None]), |
||||
1).cpu().numpy() # [label, detect, iou] |
||||
if x[0].shape[0] > 1: |
||||
matches = matches[matches[:, 2].argsort()[::-1]] |
||||
matches = matches[np.unique(matches[:, 1], return_index=True)[1]] |
||||
# matches = matches[matches[:, 2].argsort()[::-1]] |
||||
matches = matches[np.unique(matches[:, 0], return_index=True)[1]] |
||||
correct[matches[:, 1].astype(int), i] = True |
||||
return torch.tensor(correct, dtype=torch.bool, device=detections.device) |
||||
|
||||
def plot_val_samples(self, batch, ni): |
||||
"""Plots validation samples with bounding box labels.""" |
||||
plot_images(batch['img'], |
||||
batch['batch_idx'], |
||||
batch['cls'].squeeze(-1), |
||||
batch['bboxes'], |
||||
batch['masks'], |
||||
paths=batch['im_file'], |
||||
fname=self.save_dir / f'val_batch{ni}_labels.jpg', |
||||
names=self.names, |
||||
on_plot=self.on_plot) |
||||
|
||||
def plot_predictions(self, batch, preds, ni): |
||||
"""Plots batch predictions with masks and bounding boxes.""" |
||||
plot_images( |
||||
batch['img'], |
||||
*output_to_target(preds[0], max_det=15), # not set to self.args.max_det due to slow plotting speed |
||||
torch.cat(self.plot_masks, dim=0) if len(self.plot_masks) else self.plot_masks, |
||||
paths=batch['im_file'], |
||||
fname=self.save_dir / f'val_batch{ni}_pred.jpg', |
||||
names=self.names, |
||||
on_plot=self.on_plot) # pred |
||||
self.plot_masks.clear() |
||||
|
||||
def pred_to_json(self, predn, filename, pred_masks): |
||||
"""Save one JSON result.""" |
||||
# Example result = {"image_id": 42, "category_id": 18, "bbox": [258.15, 41.29, 348.26, 243.78], "score": 0.236} |
||||
from pycocotools.mask import encode # noqa |
||||
|
||||
def single_encode(x): |
||||
"""Encode predicted masks as RLE and append results to jdict.""" |
||||
rle = encode(np.asarray(x[:, :, None], order='F', dtype='uint8'))[0] |
||||
rle['counts'] = rle['counts'].decode('utf-8') |
||||
return rle |
||||
|
||||
stem = Path(filename).stem |
||||
image_id = int(stem) if stem.isnumeric() else stem |
||||
box = ops.xyxy2xywh(predn[:, :4]) # xywh |
||||
box[:, :2] -= box[:, 2:] / 2 # xy center to top-left corner |
||||
pred_masks = np.transpose(pred_masks, (2, 0, 1)) |
||||
with ThreadPool(NUM_THREADS) as pool: |
||||
rles = pool.map(single_encode, pred_masks) |
||||
for i, (p, b) in enumerate(zip(predn.tolist(), box.tolist())): |
||||
self.jdict.append({ |
||||
'image_id': image_id, |
||||
'category_id': self.class_map[int(p[5])], |
||||
'bbox': [round(x, 3) for x in b], |
||||
'score': round(p[4], 5), |
||||
'segmentation': rles[i]}) |
||||
|
||||
def eval_json(self, stats): |
||||
"""Return COCO-style object detection evaluation metrics.""" |
||||
if self.args.save_json and self.is_coco and len(self.jdict): |
||||
anno_json = self.data['path'] / 'annotations/instances_val2017.json' # annotations |
||||
pred_json = self.save_dir / 'predictions.json' # predictions |
||||
LOGGER.info(f'\nEvaluating pycocotools mAP using {pred_json} and {anno_json}...') |
||||
try: # https://github.com/cocodataset/cocoapi/blob/master/PythonAPI/pycocoEvalDemo.ipynb |
||||
check_requirements('pycocotools>=2.0.6') |
||||
from pycocotools.coco import COCO # noqa |
||||
from pycocotools.cocoeval import COCOeval # noqa |
||||
|
||||
for x in anno_json, pred_json: |
||||
assert x.is_file(), f'{x} file not found' |
||||
anno = COCO(str(anno_json)) # init annotations api |
||||
pred = anno.loadRes(str(pred_json)) # init predictions api (must pass string, not Path) |
||||
for i, eval in enumerate([COCOeval(anno, pred, 'bbox'), COCOeval(anno, pred, 'segm')]): |
||||
if self.is_coco: |
||||
eval.params.imgIds = [int(Path(x).stem) for x in self.dataloader.dataset.im_files] # im to eval |
||||
eval.evaluate() |
||||
eval.accumulate() |
||||
eval.summarize() |
||||
idx = i * 4 + 2 |
||||
stats[self.metrics.keys[idx + 1]], stats[ |
||||
self.metrics.keys[idx]] = eval.stats[:2] # update mAP50-95 and mAP50 |
||||
except Exception as e: |
||||
LOGGER.warning(f'pycocotools unable to run: {e}') |
||||
return stats |
||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
Reference in new issue