Add Dockerfiles and update Docs README (#124)
Co-authored-by: Ayush Chaurasia <ayush.chaurarsia@gmail.com> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>pull/125/head
parent
df4fc14c10
commit
a9b9fe7618
18 changed files with 608 additions and 167 deletions
@ -0,0 +1,57 @@ |
||||
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license |
||||
# Builds ultralytics/ultralytics:latest images on DockerHub https://hub.docker.com/r/ultralytics |
||||
|
||||
name: Publish Docker Images |
||||
|
||||
on: |
||||
push: |
||||
branches: [ none ] # TODO: replace with main |
||||
|
||||
jobs: |
||||
docker: |
||||
if: github.repository == 'ultralytics/ultralytics' |
||||
name: Push Docker image to Docker Hub |
||||
runs-on: ubuntu-latest |
||||
steps: |
||||
- name: Checkout repo |
||||
uses: actions/checkout@v3 |
||||
|
||||
- name: Set up QEMU |
||||
uses: docker/setup-qemu-action@v2 |
||||
|
||||
- name: Set up Docker Buildx |
||||
uses: docker/setup-buildx-action@v2 |
||||
|
||||
- name: Login to Docker Hub |
||||
uses: docker/login-action@v2 |
||||
with: |
||||
username: ${{ secrets.DOCKERHUB_USERNAME }} |
||||
password: ${{ secrets.DOCKERHUB_TOKEN }} |
||||
|
||||
- name: Build and push arm64 image |
||||
uses: docker/build-push-action@v3 |
||||
continue-on-error: true |
||||
with: |
||||
context: . |
||||
platforms: linux/arm64 |
||||
file: docker/Dockerfile-arm64 |
||||
push: true |
||||
tags: ultralytics/ultralytics:latest-arm64 |
||||
|
||||
- name: Build and push CPU image |
||||
uses: docker/build-push-action@v3 |
||||
continue-on-error: true |
||||
with: |
||||
context: . |
||||
file: docker/Dockerfile-cpu |
||||
push: true |
||||
tags: ultralytics/ultralytics:latest-cpu |
||||
|
||||
- name: Build and push GPU image |
||||
uses: docker/build-push-action@v3 |
||||
continue-on-error: true |
||||
with: |
||||
context: . |
||||
file: docker/Dockerfile |
||||
push: true |
||||
tags: ultralytics/ultralytics:latest |
||||
@ -0,0 +1,64 @@ |
||||
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license |
||||
# Builds ultralytics/ultralytics:latest image on DockerHub https://hub.docker.com/r/ultralytics/ultralytics |
||||
# Image is CUDA-optimized for YOLOv5 single/multi-GPU training and inference |
||||
|
||||
# Start FROM NVIDIA PyTorch image https://ngc.nvidia.com/catalog/containers/nvidia:pytorch |
||||
FROM nvcr.io/nvidia/pytorch:22.12-py3 |
||||
RUN rm -rf /opt/pytorch # remove 1.2GB dir |
||||
|
||||
# Downloads to user config dir |
||||
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/ |
||||
|
||||
# Install linux packages |
||||
RUN apt update && apt install --no-install-recommends -y zip htop screen libgl1-mesa-glx |
||||
|
||||
# Create working directory |
||||
RUN mkdir -p /usr/src/ultralytics |
||||
WORKDIR /usr/src/ultralytics |
||||
|
||||
# Copy contents |
||||
# COPY . /usr/src/app (issues as not a .git directory) |
||||
RUN git clone https://github.com/ultralytics/ultralytics /usr/src/ultralytics |
||||
|
||||
# Install pip packages |
||||
RUN python -m pip install --upgrade pip wheel |
||||
RUN pip uninstall -y Pillow torchtext # torch torchvision |
||||
RUN pip install --no-cache ultralytics albumentations comet gsutil notebook Pillow>=9.1.0 \ |
||||
'opencv-python<4.6.0.66' \ |
||||
--extra-index-url https://download.pytorch.org/whl/cu113 |
||||
|
||||
# Set environment variables |
||||
ENV OMP_NUM_THREADS=1 |
||||
|
||||
|
||||
# Usage Examples ------------------------------------------------------------------------------------------------------- |
||||
|
||||
# Build and Push |
||||
# t=ultralytics/ultralytics:latest && sudo docker build -f utils/docker/Dockerfile -t $t . && sudo docker push $t |
||||
|
||||
# Pull and Run |
||||
# t=ultralytics/ultralytics:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all $t |
||||
|
||||
# Pull and Run with local directory access |
||||
# t=ultralytics/ultralytics:latest && sudo docker pull $t && sudo docker run -it --ipc=host --gpus all -v "$(pwd)"/datasets:/usr/src/datasets $t |
||||
|
||||
# Kill all |
||||
# sudo docker kill $(sudo docker ps -q) |
||||
|
||||
# Kill all image-based |
||||
# sudo docker kill $(sudo docker ps -qa --filter ancestor=ultralytics/ultralytics:latest) |
||||
|
||||
# DockerHub tag update |
||||
# t=ultralytics/ultralytics:latest tnew=ultralytics/ultralytics:v6.2 && sudo docker pull $t && sudo docker tag $t $tnew && sudo docker push $tnew |
||||
|
||||
# Clean up |
||||
# docker system prune -a --volumes |
||||
|
||||
# Update Ubuntu drivers |
||||
# https://www.maketecheasier.com/install-nvidia-drivers-ubuntu/ |
||||
|
||||
# DDP test |
||||
# python -m torch.distributed.run --nproc_per_node 2 --master_port 1 train.py --epochs 3 |
||||
|
||||
# GCP VM from Image |
||||
# docker.io/ultralytics/ultralytics:latest |
||||
@ -0,0 +1,45 @@ |
||||
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license |
||||
# Builds ultralytics/ultralytics:latest-arm64 image on DockerHub https://hub.docker.com/r/ultralytics/ultralytics |
||||
# Image is aarch64-compatible for Apple M1 and other ARM architectures i.e. Jetson Nano and Raspberry Pi |
||||
|
||||
# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu |
||||
FROM arm64v8/ubuntu:20.04 |
||||
|
||||
# Downloads to user config dir |
||||
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/ |
||||
|
||||
# Install linux packages |
||||
ENV DEBIAN_FRONTEND noninteractive |
||||
RUN apt update |
||||
RUN TZ=Etc/UTC apt install -y tzdata |
||||
RUN apt install --no-install-recommends -y python3-pip git zip curl htop gcc libgl1-mesa-glx libglib2.0-0 libpython3-dev |
||||
# RUN alias python=python3 |
||||
|
||||
# Create working directory |
||||
RUN mkdir -p /usr/src/ultralytics |
||||
WORKDIR /usr/src/ultralytics |
||||
|
||||
# Copy contents |
||||
# COPY . /usr/src/app (issues as not a .git directory) |
||||
RUN git clone https://github.com/ultralytics/ultralytics /usr/src/ultralytics |
||||
|
||||
# Install pip packages |
||||
COPY requirements.txt . |
||||
RUN python3 -m pip install --upgrade pip wheel |
||||
RUN pip install --no-cache ultralytics gsutil notebook \ |
||||
tensorflow-aarch64 |
||||
# tensorflowjs \ |
||||
# onnx onnx-simplifier onnxruntime \ |
||||
# coremltools openvino-dev \ |
||||
|
||||
# Cleanup |
||||
ENV DEBIAN_FRONTEND teletype |
||||
|
||||
|
||||
# Usage Examples ------------------------------------------------------------------------------------------------------- |
||||
|
||||
# Build and Push |
||||
# t=ultralytics/ultralytics:latest-arm64 && sudo docker build --platform linux/arm64 -f utils/docker/Dockerfile-arm64 -t $t . && sudo docker push $t |
||||
|
||||
# Pull and Run |
||||
# t=ultralytics/ultralytics:latest-arm64 && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t |
||||
@ -0,0 +1,44 @@ |
||||
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license |
||||
# Builds ultralytics/ultralytics:latest-cpu image on DockerHub https://hub.docker.com/r/ultralytics/ultralytics |
||||
# Image is CPU-optimized for ONNX, OpenVINO and PyTorch YOLOv5 deployments |
||||
|
||||
# Start FROM Ubuntu image https://hub.docker.com/_/ubuntu |
||||
FROM ubuntu:20.04 |
||||
|
||||
# Downloads to user config dir |
||||
ADD https://ultralytics.com/assets/Arial.ttf https://ultralytics.com/assets/Arial.Unicode.ttf /root/.config/Ultralytics/ |
||||
|
||||
# Install linux packages |
||||
ENV DEBIAN_FRONTEND noninteractive |
||||
RUN apt update |
||||
RUN TZ=Etc/UTC apt install -y tzdata |
||||
RUN apt install --no-install-recommends -y python3-pip git zip curl htop libgl1-mesa-glx libglib2.0-0 libpython3-dev gnupg |
||||
# RUN alias python=python3 |
||||
|
||||
# Create working directory |
||||
RUN mkdir -p /usr/src/ultralytics |
||||
WORKDIR /usr/src/ultralytics |
||||
|
||||
# Copy contents |
||||
# COPY . /usr/src/app (issues as not a .git directory) |
||||
RUN git clone https://github.com/ultralytics/ultralytics /usr/src/ultralytics |
||||
|
||||
# Install pip packages |
||||
COPY requirements.txt . |
||||
RUN python3 -m pip install --upgrade pip wheel |
||||
RUN pip install --no-cache ultralytics albumentations gsutil notebook \ |
||||
coremltools onnx onnx-simplifier onnxruntime tensorflow-cpu tensorflowjs \ |
||||
# openvino-dev \ |
||||
--extra-index-url https://download.pytorch.org/whl/cpu |
||||
|
||||
# Cleanup |
||||
ENV DEBIAN_FRONTEND teletype |
||||
|
||||
|
||||
# Usage Examples ------------------------------------------------------------------------------------------------------- |
||||
|
||||
# Build and Push |
||||
# t=ultralytics/ultralytics:latest-cpu && sudo docker build -f utils/docker/Dockerfile-cpu -t $t . && sudo docker push $t |
||||
|
||||
# Pull and Run |
||||
# t=ultralytics/ultralytics:latest-cpu && sudo docker pull $t && sudo docker run -it --ipc=host -v "$(pwd)"/datasets:/usr/src/datasets $t |
||||
@ -1,7 +1,85 @@ |
||||
## To serve docs |
||||
* Install ultralytics repo in Dev mode: |
||||
# Ultralytics Docs |
||||
|
||||
Deployed to https://docs.ultralytics.com |
||||
|
||||
### Install Ultralytics package |
||||
|
||||
To install the ultralytics package in developer mode, you will need to have Git and Python 3 installed on your system. |
||||
Then, follow these steps: |
||||
|
||||
1. Clone the ultralytics repository to your local machine using Git: |
||||
|
||||
```bash |
||||
git clone https://github.com/ultralytics/ultralytics.git |
||||
``` |
||||
|
||||
2. Navigate to the root directory of the repository: |
||||
|
||||
```bash |
||||
cd ultralytics |
||||
``` |
||||
|
||||
3. Install the package in developer mode using pip: |
||||
|
||||
```bash |
||||
pip install -e '.[dev]' |
||||
``` |
||||
* Run `mkdocs serve` |
||||
|
||||
This will install the ultralytics package and its dependencies in developer mode, allowing you to make changes to the |
||||
package code and have them reflected immediately in your Python environment. |
||||
|
||||
Note that you may need to use the pip3 command instead of pip if you have multiple versions of Python installed on your |
||||
system. |
||||
|
||||
### Building and Serving Locally |
||||
|
||||
The `mkdocs serve` command is used to build and serve a local version of the MkDocs documentation site. It is typically |
||||
used during the development and testing phase of a documentation project. |
||||
|
||||
```bash |
||||
mkdocs serve |
||||
``` |
||||
|
||||
Here is a breakdown of what this command does: |
||||
|
||||
- `mkdocs`: This is the command-line interface (CLI) for the MkDocs static site generator. It is used to build and serve |
||||
MkDocs sites. |
||||
- `serve`: This is a subcommand of the `mkdocs` CLI that tells it to build and serve the documentation site locally. |
||||
- `-a`: This flag specifies the hostname and port number to bind the server to. The default value is `localhost:8000`. |
||||
- `-t`: This flag specifies the theme to use for the documentation site. The default value is `mkdocs`. |
||||
- `-s`: This flag tells the `serve` command to serve the site in silent mode, which means it will not display any log |
||||
messages or progress updates. |
||||
When you run the `mkdocs serve` command, it will build the documentation site using the files in the `docs/` directory |
||||
and serve it at the specified hostname and port number. You can then view the site by going to the URL in your web |
||||
browser. |
||||
|
||||
While the site is being served, you can make changes to the documentation files and see them reflected in the live site |
||||
immediately. This is useful for testing and debugging your documentation before deploying it to a live server. |
||||
|
||||
To stop the serve command and terminate the local server, you can use the `CTRL+C` keyboard shortcut. |
||||
|
||||
### Deploying Your Documentation Site |
||||
|
||||
To deploy your MkDocs documentation site, you will need to choose a hosting provider and a deployment method. Some |
||||
popular options include GitHub Pages, GitLab Pages, and Amazon S3. |
||||
|
||||
Before you can deploy your site, you will need to configure your `mkdocs.yml` file to specify the remote host and any |
||||
other necessary deployment settings. |
||||
|
||||
Once you have configured your `mkdocs.yml` file, you can use the `mkdocs deploy` command to build and deploy your site. |
||||
This command will build the documentation site using the files in the `docs/` directory and the specified configuration |
||||
file and theme, and then deploy the site to the specified remote host. |
||||
|
||||
For example, to deploy your site to GitHub Pages using the gh-deploy plugin, you can use the following command: |
||||
|
||||
```bash |
||||
mkdocs gh-deploy |
||||
``` |
||||
|
||||
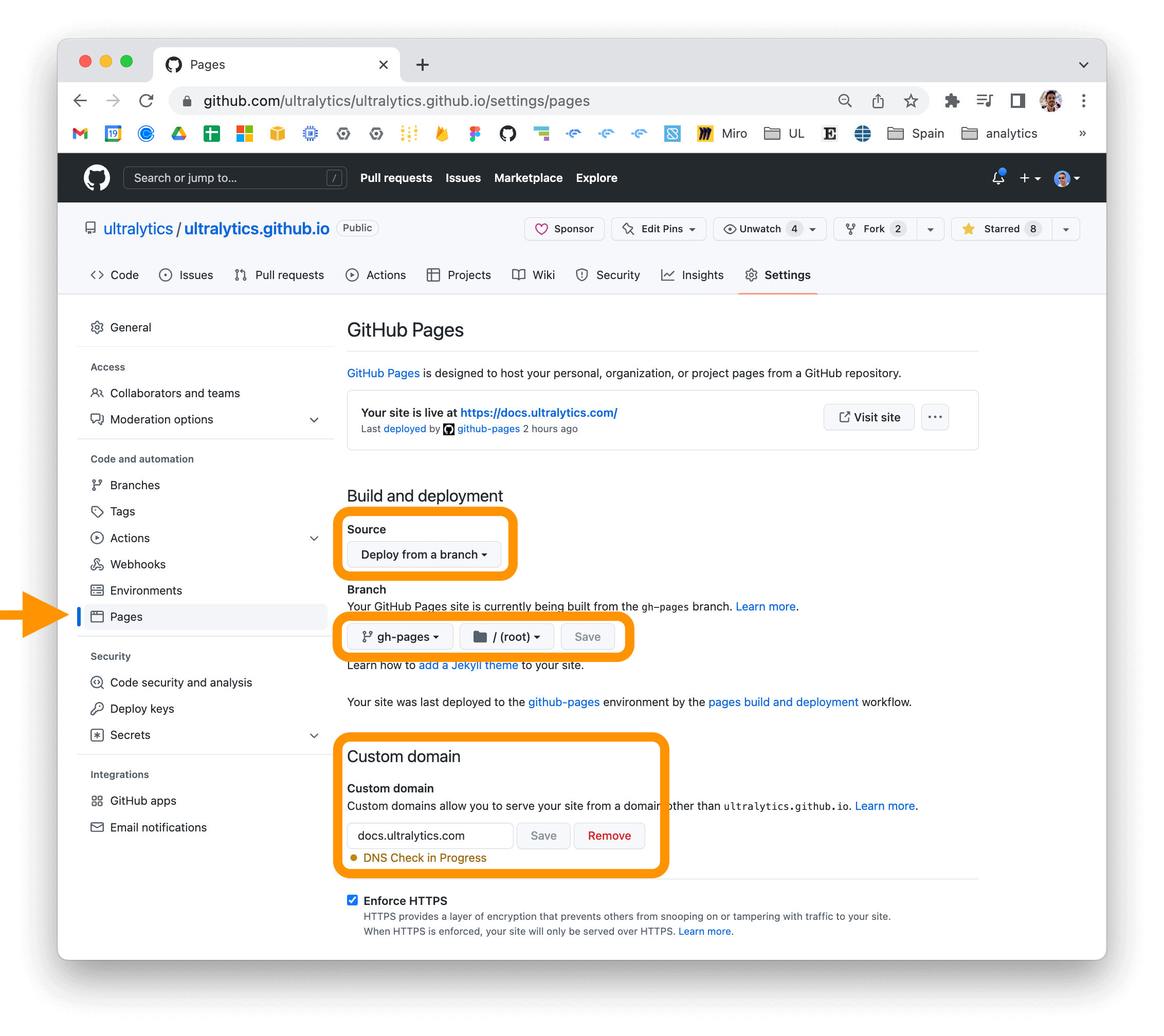
If you are using GitHub Pages, you can set a custom domain for your documentation site by going to the "Settings" page |
||||
for your repository and updating the "Custom domain" field in the "GitHub Pages" section. |
||||
|
||||
 |
||||
|
||||
For more information on deploying your MkDocs documentation site, see |
||||
the [MkDocs documentation](https://www.mkdocs.org/user-guide/deploying-your-docs/). |
||||
|
||||
@ -1,109 +0,0 @@ |
||||
## Ultralytics YOLO |
||||
|
||||
Default training settings and hyperparameters for medium-augmentation COCO training |
||||
|
||||
### Setting the operation type |
||||
???+ note "Operation" |
||||
|
||||
| Key | Value | Description | |
||||
|--------|----------|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------| |
||||
| task | `detect` | Set the task via CLI. See Tasks for all supported tasks like - `detect`, `segment`, `classify`.<br> - `init` is a special case that creates a copy of default.yaml configs to the current working dir | |
||||
| mode | `train` | Set the mode via CLI. It can be `train`, `val`, `predict` | |
||||
| resume | `False` | Resume last given task when set to `True`. <br> Resume from a given checkpoint is `model.pt` is passed | |
||||
| model | null | Set the model. Format can differ for task type. Supports `model_name`, `model.yaml` & `model.pt` | |
||||
| data | null | Set the data. Format can differ for task type. Supports `data.yaml`, `data_folder`, `dataset_name`| |
||||
|
||||
### Training settings |
||||
??? note "Train" |
||||
| Key | Value | Description | |
||||
|------------------|--------|---------------------------------------------------------------------------------| |
||||
| device | '' | cuda device, i.e. 0 or 0,1,2,3 or cpu. `''` selects available cuda 0 device | |
||||
| epochs | 100 | Number of epochs to train | |
||||
| workers | 8 | Number of cpu workers used per process. Scales automatically with DDP | |
||||
| batch_size | 16 | Batch size of the dataloader | |
||||
| imgsz | 640 | Image size of data in dataloader | |
||||
| optimizer | SGD | Optimizer used. Supported optimizer are: `Adam`, `SGD`, `RMSProp` | |
||||
| single_cls | False | Train on multi-class data as single-class | |
||||
| image_weights | False | Use weighted image selection for training | |
||||
| rect | False | Enable rectangular training | |
||||
| cos_lr | False | Use cosine LR scheduler | |
||||
| lr0 | 0.01 | Initial learning rate | |
||||
| lrf | 0.01 | Final OneCycleLR learning rate | |
||||
| momentum | 0.937 | Use as `momentum` for SGD and `beta1` for Adam | |
||||
| weight_decay | 0.0005 | Optimizer weight decay | |
||||
| warmup_epochs | 3.0 | Warmup epochs. Fractions are ok. | |
||||
| warmup_momentum | 0.8 | Warmup initial momentum | |
||||
| warmup_bias_lr | 0.1 | Warmup initial bias lr | |
||||
| box | 0.05 | Box loss gain | |
||||
| cls | 0.5 | cls loss gain | |
||||
| cls_pw | 1.0 | cls BCELoss positive_weight | |
||||
| obj | 1.0 | bj loss gain (scale with pixels) | |
||||
| obj_pw | 1.0 | obj BCELoss positive_weight | |
||||
| iou_t | 0.20 | IOU training threshold | |
||||
| anchor_t | 4.0 | anchor-multiple threshold | |
||||
| fl_gamma | 0.0 | focal loss gamma | |
||||
| label_smoothing | 0.0 | | |
||||
| nbs | 64 | nominal batch size | |
||||
| overlap_mask | `True` | **Segmentation**: Use mask overlapping during training | |
||||
| mask_ratio | 4 | **Segmentation**: Set mask downsampling | |
||||
| dropout | `False`| **Classification**: Use dropout while training | |
||||
### Prediction Settings |
||||
??? note "Prediction" |
||||
| Key | Value | Description | |
||||
|----------------|----------------------|----------------------------------------------------| |
||||
| source | `ultralytics/assets` | Input source. Accepts image, folder, video, url | |
||||
| view_img | `False` | View the prediction images | |
||||
| save_txt | `False` | Save the results in a txt file | |
||||
| save_conf | `False` | Save the condidence scores | |
||||
| save_crop | `Fasle` | | |
||||
| hide_labels | `False` | Hide the labels | |
||||
| hide_conf | `False` | Hide the confidence scores | |
||||
| vid_stride | `False` | Input video frame-rate stride | |
||||
| line_thickness | `3` | Bounding-box thickness (pixels) | |
||||
| visualize | `False` | Visualize model features | |
||||
| augment | `False` | Augmented inference | |
||||
| agnostic_nms | `False` | Class-agnostic NMS | |
||||
| retina_masks | `False` | **Segmentation:** High resolution masks | |
||||
|
||||
|
||||
### Validation settings |
||||
??? note "Validation" |
||||
| Key | Value | Description | |
||||
|-------------|---------|-----------------------------------| |
||||
| noval | `False` | ??? | |
||||
| save_json | `False` | | |
||||
| save_hybrid | `False` | | |
||||
| conf_thres | `0.001` | Confidence threshold | |
||||
| iou_thres | `0.6` | IoU threshold | |
||||
| max_det | `300` | Maximum number of detections | |
||||
| half | `True` | Use .half() mode. | |
||||
| dnn | `False` | Use OpenCV DNN for ONNX inference | |
||||
| plots | `False` | | |
||||
|
||||
### Augmentation settings |
||||
??? note "Augmentation" |
||||
|
||||
| hsv_h | 0.015 | Image HSV-Hue augmentation (fraction) | |
||||
|-------------|-------|-------------------------------------------------| |
||||
| hsv_s | 0.7 | Image HSV-Saturation augmentation (fraction) | |
||||
| hsv_v | 0.4 | Image HSV-Value augmentation (fraction) | |
||||
| degrees | 0.0 | Image rotation (+/- deg) | |
||||
| translate | 0.1 | Image translation (+/- fraction) | |
||||
| scale | 0.5 | Image scale (+/- gain) | |
||||
| shear | 0.0 | Image shear (+/- deg) | |
||||
| perspective | 0.0 | Image perspective (+/- fraction), range 0-0.001 | |
||||
| flipud | 0.0 | Image flip up-down (probability) | |
||||
| fliplr | 0.5 | Image flip left-right (probability) | |
||||
| mosaic | 1.0 | Image mosaic (probability) | |
||||
| mixup | 0.0 | Image mixup (probability) | |
||||
| copy_paste | 0.0 | Segment copy-paste (probability) | |
||||
|
||||
### Logging, checkpoints, plotting and file management |
||||
??? note "files" |
||||
| Key | Value | Description | |
||||
|-----------|---------|---------------------------------------------------------------------------------------------| |
||||
| project: | 'runs' | The project name | |
||||
| name: | 'exp' | The run name. `exp` gets automatically incremented if not specified, i.e, `exp`, `exp2` ... | |
||||
| exist_ok: | `False` | ??? | |
||||
| plots | `False` | **Validation**: Save plots while validation | |
||||
| nosave | `False` | Don't save any plots, models or files | |
||||
@ -0,0 +1,202 @@ |
||||
YOLO settings and hyperparameters play a critical role in the model's performance, speed, and accuracy. These settings |
||||
and hyperparameters can affect the model's behavior at various stages of the model development process, including |
||||
training, validation, and prediction. |
||||
|
||||
Properly setting and tuning these parameters can have a significant impact on the model's ability to learn effectively |
||||
from the training data and generalize to new data. For example, choosing an appropriate learning rate, batch size, and |
||||
optimization algorithm can greatly affect the model's convergence speed and accuracy. Similarly, setting the correct |
||||
confidence threshold and non-maximum suppression (NMS) threshold can affect the model's performance on detection tasks. |
||||
|
||||
It is important to carefully consider and experiment with these settings and hyperparameters to achieve the best |
||||
possible performance for a given task. This can involve trial and error, as well as using techniques such as |
||||
hyperparameter optimization to search for the optimal set of parameters. |
||||
|
||||
In summary, YOLO settings and hyperparameters are a key factor in the success of a YOLO model, and it is important to |
||||
pay careful attention to them to achieve the desired results. |
||||
|
||||
### Setting the operation type |
||||
|
||||
YOLO models can be used for a variety of tasks, including detection, segmentation, and classification. These tasks |
||||
differ in the type of output they produce and the specific problem they are designed to solve. |
||||
|
||||
- Detection: Detection tasks involve identifying and localizing objects or regions of interest in an image or video. |
||||
YOLO models can be used for object detection tasks by predicting the bounding boxes and class labels of objects in an |
||||
image. |
||||
- Segmentation: Segmentation tasks involve dividing an image or video into regions or pixels that correspond to |
||||
different objects or classes. YOLO models can be used for image segmentation tasks by predicting a mask or label for |
||||
each pixel in an image. |
||||
- Classification: Classification tasks involve assigning a class label to an input, such as an image or text. YOLO |
||||
models can be used for image classification tasks by predicting the class label of an input image. |
||||
|
||||
YOLO models can be used in different modes depending on the specific problem you are trying to solve. These modes |
||||
include train, val, and predict. |
||||
|
||||
- Train: The train mode is used to train the model on a dataset. This mode is typically used during the development and |
||||
testing phase of a model. |
||||
- Val: The val mode is used to evaluate the model's performance on a validation dataset. This mode is typically used to |
||||
tune the model's hyperparameters and detect overfitting. |
||||
- Predict: The predict mode is used to make predictions with the model on new data. This mode is typically used in |
||||
production or when deploying the model to users. |
||||
|
||||
| Key | Value | Description | |
||||
|--------|----------|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------| |
||||
| task | `detect` | Set the task via CLI. See Tasks for all supported tasks like - `detect`, `segment`, `classify`.<br> - `init` is a special case that creates a copy of default.yaml configs to the current working dir | |
||||
| mode | `train` | Set the mode via CLI. It can be `train`, `val`, `predict` | |
||||
| resume | `False` | Resume last given task when set to `True`. <br> Resume from a given checkpoint is `model.pt` is passed | |
||||
| model | null | Set the model. Format can differ for task type. Supports `model_name`, `model.yaml` & `model.pt` | |
||||
| data | null | Set the data. Format can differ for task type. Supports `data.yaml`, `data_folder`, `dataset_name` | |
||||
|
||||
### Training settings |
||||
|
||||
Training settings for YOLO models refer to the various hyperparameters and configurations used to train the model on a |
||||
dataset. These settings can affect the model's performance, speed, and accuracy. Some common YOLO training settings |
||||
include the batch size, learning rate, momentum, and weight decay. Other factors that may affect the training process |
||||
include the choice of optimizer, the choice of loss function, and the size and composition of the training dataset. It |
||||
is important to carefully tune and experiment with these settings to achieve the best possible performance for a given |
||||
task. |
||||
|
||||
| Key | Value | Description | |
||||
|-----------------|---------|-----------------------------------------------------------------------------| |
||||
| device | '' | cuda device, i.e. 0 or 0,1,2,3 or cpu. `''` selects available cuda 0 device | |
||||
| epochs | 100 | Number of epochs to train | |
||||
| workers | 8 | Number of cpu workers used per process. Scales automatically with DDP | |
||||
| batch_size | 16 | Batch size of the dataloader | |
||||
| imgsz | 640 | Image size of data in dataloader | |
||||
| optimizer | SGD | Optimizer used. Supported optimizer are: `Adam`, `SGD`, `RMSProp` | |
||||
| single_cls | False | Train on multi-class data as single-class | |
||||
| image_weights | False | Use weighted image selection for training | |
||||
| rect | False | Enable rectangular training | |
||||
| cos_lr | False | Use cosine LR scheduler | |
||||
| lr0 | 0.01 | Initial learning rate | |
||||
| lrf | 0.01 | Final OneCycleLR learning rate | |
||||
| momentum | 0.937 | Use as `momentum` for SGD and `beta1` for Adam | |
||||
| weight_decay | 0.0005 | Optimizer weight decay | |
||||
| warmup_epochs | 3.0 | Warmup epochs. Fractions are ok. | |
||||
| warmup_momentum | 0.8 | Warmup initial momentum | |
||||
| warmup_bias_lr | 0.1 | Warmup initial bias lr | |
||||
| box | 0.05 | Box loss gain | |
||||
| cls | 0.5 | cls loss gain | |
||||
| cls_pw | 1.0 | cls BCELoss positive_weight | |
||||
| obj | 1.0 | bj loss gain (scale with pixels) | |
||||
| obj_pw | 1.0 | obj BCELoss positive_weight | |
||||
| iou_t | 0.20 | IOU training threshold | |
||||
| anchor_t | 4.0 | anchor-multiple threshold | |
||||
| fl_gamma | 0.0 | focal loss gamma | |
||||
| label_smoothing | 0.0 | | |
||||
| nbs | 64 | nominal batch size | |
||||
| overlap_mask | `True` | **Segmentation**: Use mask overlapping during training | |
||||
| mask_ratio | 4 | **Segmentation**: Set mask downsampling | |
||||
| dropout | `False` | **Classification**: Use dropout while training | |
||||
|
||||
### Prediction Settings |
||||
|
||||
Prediction settings for YOLO models refer to the various hyperparameters and configurations used to make predictions |
||||
with the model on new data. These settings can affect the model's performance, speed, and accuracy. Some common YOLO |
||||
prediction settings include the confidence threshold, non-maximum suppression (NMS) threshold, and the number of classes |
||||
to consider. Other factors that may affect the prediction process include the size and format of the input data, the |
||||
presence of additional features such as masks or multiple labels per box, and the specific task the model is being used |
||||
for. It is important to carefully tune and experiment with these settings to achieve the best possible performance for a |
||||
given task. |
||||
|
||||
| Key | Value | Description | |
||||
|----------------|----------------------|-------------------------------------------------| |
||||
| source | `ultralytics/assets` | Input source. Accepts image, folder, video, url | |
||||
| view_img | `False` | View the prediction images | |
||||
| save_txt | `False` | Save the results in a txt file | |
||||
| save_conf | `False` | Save the condidence scores | |
||||
| save_crop | `Fasle` | | |
||||
| hide_labels | `False` | Hide the labels | |
||||
| hide_conf | `False` | Hide the confidence scores | |
||||
| vid_stride | `False` | Input video frame-rate stride | |
||||
| line_thickness | `3` | Bounding-box thickness (pixels) | |
||||
| visualize | `False` | Visualize model features | |
||||
| augment | `False` | Augmented inference | |
||||
| agnostic_nms | `False` | Class-agnostic NMS | |
||||
| retina_masks | `False` | **Segmentation:** High resolution masks | |
||||
|
||||
### Validation settings |
||||
|
||||
Validation settings for YOLO models refer to the various hyperparameters and configurations used to |
||||
evaluate the model's performance on a validation dataset. These settings can affect the model's performance, speed, and |
||||
accuracy. Some common YOLO validation settings include the batch size, the frequency with which validation is performed |
||||
during training, and the metrics used to evaluate the model's performance. Other factors that may affect the validation |
||||
process include the size and composition of the validation dataset and the specific task the model is being used for. It |
||||
is important to carefully tune and experiment with these settings to ensure that the model is performing well on the |
||||
validation dataset and to detect and prevent overfitting. |
||||
|
||||
| Key | Value | Description | |
||||
|-------------|---------|-----------------------------------| |
||||
| noval | `False` | ??? | |
||||
| save_json | `False` | | |
||||
| save_hybrid | `False` | | |
||||
| conf_thres | `0.001` | Confidence threshold | |
||||
| iou_thres | `0.6` | IoU threshold | |
||||
| max_det | `300` | Maximum number of detections | |
||||
| half | `True` | Use .half() mode. | |
||||
| dnn | `False` | Use OpenCV DNN for ONNX inference | |
||||
| plots | `False` | | |
||||
|
||||
### Export settings |
||||
|
||||
Export settings for YOLO models refer to the various configurations and options used to save or |
||||
export the model for use in other environments or platforms. These settings can affect the model's performance, size, |
||||
and compatibility with different systems. Some common YOLO export settings include the format of the exported model |
||||
file (e.g. ONNX, TensorFlow SavedModel), the device on which the model will be run (e.g. CPU, GPU), and the presence of |
||||
additional features such as masks or multiple labels per box. Other factors that may affect the export process include |
||||
the specific task the model is being used for and the requirements or constraints of the target environment or platform. |
||||
It is important to carefully consider and configure these settings to ensure that the exported model is optimized for |
||||
the intended use case and can be used effectively in the target environment. |
||||
|
||||
### Augmentation settings |
||||
|
||||
Augmentation settings for YOLO models refer to the various transformations and modifications |
||||
applied to the training data to increase the diversity and size of the dataset. These settings can affect the model's |
||||
performance, speed, and accuracy. Some common YOLO augmentation settings include the type and intensity of the |
||||
transformations applied (e.g. random flips, rotations, cropping, color changes), the probability with which each |
||||
transformation is applied, and the presence of additional features such as masks or multiple labels per box. Other |
||||
factors that may affect the augmentation process include the size and composition of the original dataset and the |
||||
specific task the model is being used for. It is important to carefully tune and experiment with these settings to |
||||
ensure that the augmented dataset is diverse and representative enough to train a high-performing model. |
||||
|
||||
| hsv_h | 0.015 | Image HSV-Hue augmentation (fraction) | |
||||
|-------------|-------|-------------------------------------------------| |
||||
| hsv_s | 0.7 | Image HSV-Saturation augmentation (fraction) | |
||||
| hsv_v | 0.4 | Image HSV-Value augmentation (fraction) | |
||||
| degrees | 0.0 | Image rotation (+/- deg) | |
||||
| translate | 0.1 | Image translation (+/- fraction) | |
||||
| scale | 0.5 | Image scale (+/- gain) | |
||||
| shear | 0.0 | Image shear (+/- deg) | |
||||
| perspective | 0.0 | Image perspective (+/- fraction), range 0-0.001 | |
||||
| flipud | 0.0 | Image flip up-down (probability) | |
||||
| fliplr | 0.5 | Image flip left-right (probability) | |
||||
| mosaic | 1.0 | Image mosaic (probability) | |
||||
| mixup | 0.0 | Image mixup (probability) | |
||||
| copy_paste | 0.0 | Segment copy-paste (probability) | |
||||
|
||||
### Logging, checkpoints, plotting and file management |
||||
|
||||
Logging, checkpoints, plotting, and file management are important considerations when training a YOLO model. |
||||
|
||||
- Logging: It is often helpful to log various metrics and statistics during training to track the model's progress and |
||||
diagnose any issues that may arise. This can be done using a logging library such as TensorBoard or by writing log |
||||
messages to a file. |
||||
- Checkpoints: It is a good practice to save checkpoints of the model at regular intervals during training. This allows |
||||
you to resume training from a previous point if the training process is interrupted or if you want to experiment with |
||||
different training configurations. |
||||
- Plotting: Visualizing the model's performance and training progress can be helpful for understanding how the model is |
||||
behaving and identifying potential issues. This can be done using a plotting library such as matplotlib or by |
||||
generating plots using a logging library such as TensorBoard. |
||||
- File management: Managing the various files generated during the training process, such as model checkpoints, log |
||||
files, and plots, can be challenging. It is important to have a clear and organized file structure to keep track of |
||||
these files and make it easy to access and analyze them as needed. |
||||
|
||||
Effective logging, checkpointing, plotting, and file management can help you keep track of the model's progress and make |
||||
it easier to debug and optimize the training process. |
||||
|
||||
| Key | Value | Description | |
||||
|-----------|---------|---------------------------------------------------------------------------------------------| |
||||
| project: | 'runs' | The project name | |
||||
| name: | 'exp' | The run name. `exp` gets automatically incremented if not specified, i.e, `exp`, `exp2` ... | |
||||
| exist_ok: | `False` | ??? | |
||||
| plots | `False` | **Validation**: Save plots while validation | |
||||
| nosave | `False` | Don't save any plots, models or files | |
||||
@ -1,3 +1,40 @@ |
||||
# Welcome to Ultralytics YOLO |
||||
|
||||
TODO |
||||
Welcome to the Ultralytics YOLO documentation landing page! Ultralytics YOLOv8 is the latest version of the YOLO (You |
||||
Only Look Once) object detection and image segmentation model developed by Ultralytics. This page serves as the starting |
||||
point for exploring the various resources available to help you get started with YOLOv8 and understand its features and |
||||
capabilities. |
||||
|
||||
The YOLOv8 model is designed to be fast, accurate, and easy to use, making it an excellent choice for a wide range of |
||||
object detection and image segmentation tasks. It can be trained on large datasets and is capable of running on a |
||||
variety of hardware platforms, from CPUs to GPUs. |
||||
|
||||
Whether you are a seasoned machine learning practitioner or new to the field, we hope that the resources on this page |
||||
will help you get the most out of YOLOv8. Please feel free to browse the documentation and reach out to us with any |
||||
questions or feedback. |
||||
|
||||
### A Brief History of YOLO |
||||
|
||||
YOLO (You Only Look Once) is a popular object detection and image segmentation model developed by Joseph Redmon and Ali |
||||
Farhadi at the University of Washington. The first version of YOLO was released in 2015 and quickly gained popularity |
||||
due to its high speed and accuracy. |
||||
|
||||
YOLOv2 was released in 2016 and improved upon the original model by incorporating batch normalization, anchor boxes, and |
||||
dimension clusters. YOLOv3 was released in 2018 and further improved the model's performance by using a more efficient |
||||
backbone network, adding a feature pyramid, and making use of focal loss. |
||||
|
||||
In 2020, YOLOv4 was released which introduced a number of innovations such as the use of Mosaic data augmentation, a new |
||||
anchor-free detection head, and a new loss function. |
||||
|
||||
In 2021, Ultralytics released YOLOv5, which further improved the model's performance and added new features such as |
||||
support for panoptic segmentation and object tracking. |
||||
|
||||
YOLO has been widely used in a variety of applications, including autonomous vehicles, security and surveillance, and |
||||
medical imaging. It has also been used to win several competitions, such as the COCO Object Detection Challenge and the |
||||
DOTA Object Detection Challenge. |
||||
|
||||
For more information about the history and development of YOLO, you can refer to the following references: |
||||
|
||||
- Redmon, J., & Farhadi, A. (2015). You only look once: Unified, real-time object detection. In Proceedings of the IEEE |
||||
conference on computer vision and pattern recognition (pp. 779-788). |
||||
- Redmon, J., & Farhadi, A. (2016). YOLO9000: Better, faster, stronger. In Proceedings |
||||
@ -0,0 +1,5 @@ |
||||
All task Predictors are inherited from `BasePredictors` class that contains the model validation routine boilerplate. You can override any function of these Trainers to suit your needs. |
||||
|
||||
--- |
||||
### BasePredictor API Reference |
||||
:::ultralytics.yolo.engine.predictor.BasePredictor |
||||
@ -0,0 +1,5 @@ |
||||
All task Validators are inherited from `BaseValidator` class that contains the model validation routine boilerplate. You can override any function of these Trainers to suit your needs. |
||||
|
||||
--- |
||||
### BaseValidator API Reference |
||||
:::ultralytics.yolo.engine.validator.BaseValidator |
||||
@ -0,0 +1,2 @@ |
||||
### Exporter API Reference |
||||
:::ultralytics.yolo.engine.exporter.Exporter |
||||
Loading…
Reference in new issue