`ultralytics 8.1.14` new YOLOv8-World models (#8054)
Signed-off-by: Glenn Jocher <glenn.jocher@ultralytics.com> Co-authored-by: UltralyticsAssistant <web@ultralytics.com> Co-authored-by: Glenn Jocher <glenn.jocher@ultralytics.com>pull/8202/head v8.1.14
parent
f9e9cdf2c3
commit
850ca8587f
19 changed files with 683 additions and 32 deletions
@ -0,0 +1,206 @@ |
||||
--- |
||||
comments: true |
||||
description: Discover YOLO-World, a YOLOv8-based framework for real-time open-vocabulary object detection in images. It enhances user interaction, boosts computational efficiency, and adapts across various vision tasks. |
||||
keywords: YOLO-World, YOLOv8, machine learning, CNN-based framework, object detection, real-time detection, Ultralytics, vision tasks, image processing, industrial applications, user interaction |
||||
--- |
||||
|
||||
# YOLO-World Model |
||||
|
||||
The YOLO-World Model introduces an advanced, real-time [Ultralytics](https://ultralytics.com) [YOLOv8](yolov8.md)-based approach for Open-Vocabulary Detection tasks. This innovation enables the detection of any object within an image based on descriptive texts. By significantly lowering computational demands while preserving competitive performance, YOLO-World emerges as a versatile tool for numerous vision-based applications. |
||||
|
||||
 |
||||
|
||||
## Overview |
||||
|
||||
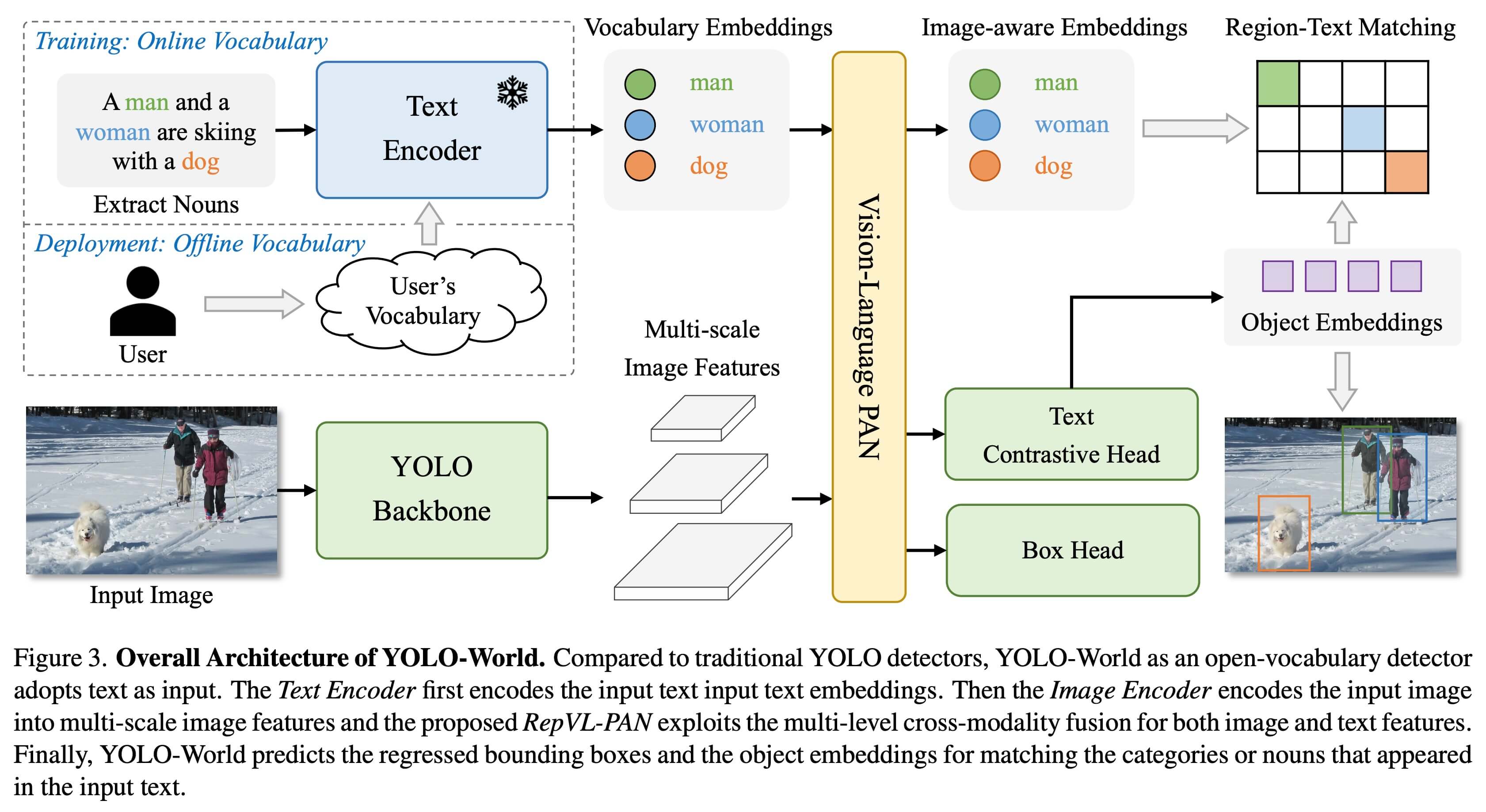
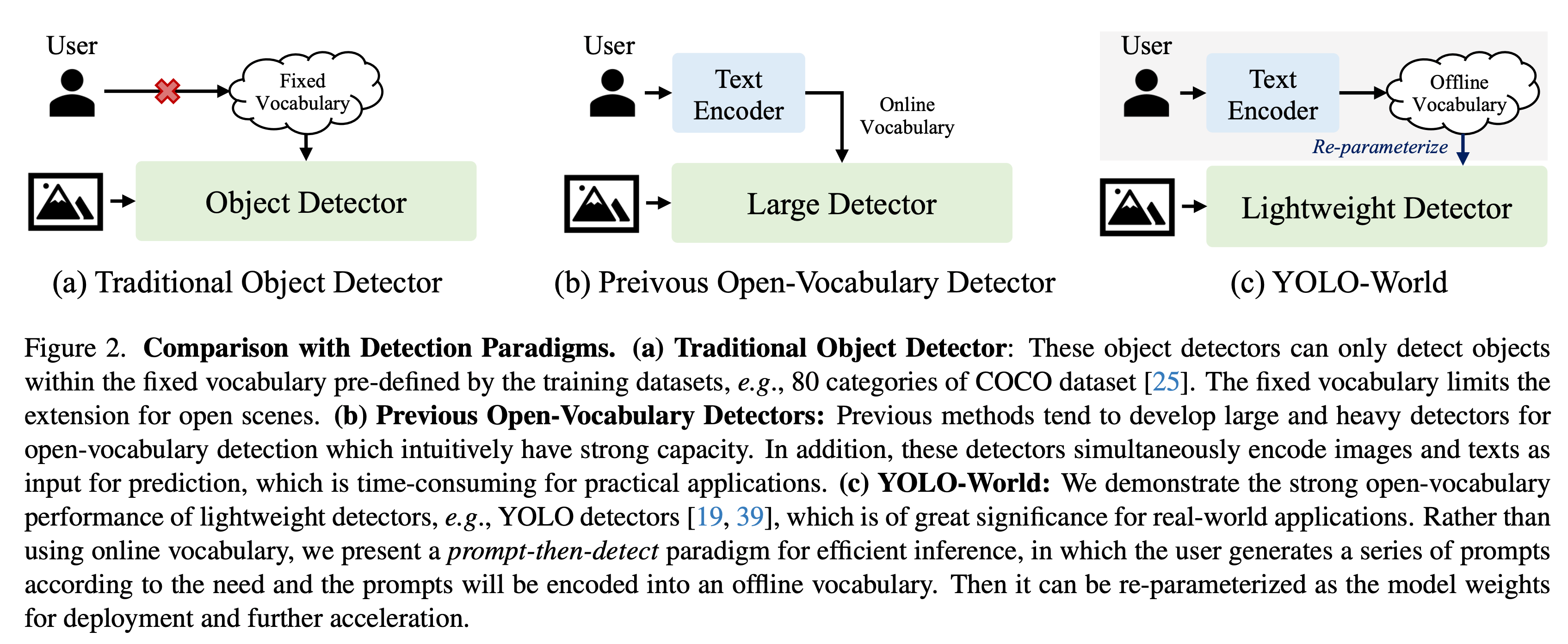
YOLO-World tackles the challenges faced by traditional Open-Vocabulary detection models, which often rely on cumbersome Transformer models requiring extensive computational resources. These models' dependence on pre-defined object categories also restricts their utility in dynamic scenarios. YOLO-World revitalizes the YOLOv8 framework with open-vocabulary detection capabilities, employing vision-language modeling and pre-training on expansive datasets to excel at identifying a broad array of objects in zero-shot scenarios with unmatched efficiency. |
||||
|
||||
## Key Features |
||||
|
||||
1. **Real-time Solution:** Harnessing the computational speed of CNNs, YOLO-World delivers a swift open-vocabulary detection solution, catering to industries in need of immediate results. |
||||
|
||||
2. **Efficiency and Performance:** YOLO-World slashes computational and resource requirements without sacrificing performance, offering a robust alternative to models like SAM but at a fraction of the computational cost, enabling real-time applications. |
||||
|
||||
3. **Inference with Offline Vocabulary:** YOLO-World introduces a "prompt-then-detect" strategy, employing an offline vocabulary to enhance efficiency further. This approach enables the use of custom prompts computed apriori, including captions or categories, to be encoded and stored as offline vocabulary embeddings, streamlining the detection process. |
||||
|
||||
4. **Powered by YOLOv8:** Built upon [Ultralytics YOLOv8](yolov8.md), YOLO-World leverages the latest advancements in real-time object detection to facilitate open-vocabulary detection with unparalleled accuracy and speed. |
||||
|
||||
5. **Benchmark Excellence:** YOLO-World outperforms existing open-vocabulary detectors, including MDETR and GLIP series, in terms of speed and efficiency on standard benchmarks, showcasing YOLOv8's superior capability on a single NVIDIA V100 GPU. |
||||
|
||||
6. **Versatile Applications:** YOLO-World's innovative approach unlocks new possibilities for a multitude of vision tasks, delivering speed improvements by orders of magnitude over existing methods. |
||||
|
||||
## Available Models, Supported Tasks, and Operating Modes |
||||
|
||||
This section details the models available with their specific pre-trained weights, the tasks they support, and their compatibility with various operating modes such as [Inference](../modes/predict.md), [Validation](../modes/val.md), [Training](../modes/train.md), and [Export](../modes/export.md), denoted by ✅ for supported modes and ❌ for unsupported modes. |
||||
|
||||
!!! Note |
||||
|
||||
All the YOLOv8-World weights have been directly migrated from the official [YOLO-World](https://github.com/AILab-CVC/YOLO-World) repository, highlighting their excellent contributions. |
||||
|
||||
| Model Type | Pre-trained Weights | Tasks Supported | Inference | Validation | Training | Export | |
||||
|---------------|-----------------------------------------------------------------------------------------------------|----------------------------------------|-----------|------------|----------|--------| |
||||
| YOLOv8s-world | [yolov8s-world.pt](https://github.com/ultralytics/assets/releases/download/v8.1.0/yolov8s-world.pt) | [Object Detection](../tasks/detect.md) | ✅ | ✅ | ❌ | ❌ | |
||||
| YOLOv8m-world | [yolov8m-world.pt](https://github.com/ultralytics/assets/releases/download/v8.1.0/yolov8m-world.pt) | [Object Detection](../tasks/detect.md) | ✅ | ✅ | ❌ | ❌ | |
||||
| YOLOv8l-world | [yolov8l-world.pt](https://github.com/ultralytics/assets/releases/download/v8.1.0/yolov8l-world.pt) | [Object Detection](../tasks/detect.md) | ✅ | ✅ | ❌ | ❌ | |
||||
|
||||
## Zero-shot Transfer on COCO Dataset |
||||
|
||||
| Model Type | mAP | mAP50 | mAP75 | |
||||
|---------------|------|-------|-------| |
||||
| yolov8s-world | 37.4 | 52.0 | 40.6 | |
||||
| yolov8m-world | 42.0 | 57.0 | 45.6 | |
||||
| yolov8l-world | 45.7 | 61.3 | 49.8 | |
||||
|
||||
## Usage Examples |
||||
|
||||
The YOLO-World models are easy to integrate into your Python applications. Ultralytics provides user-friendly Python API and CLI commands to streamline development. |
||||
|
||||
### Predict Usage |
||||
|
||||
Object detection is straightforward with the `predict` method, as illustrated below: |
||||
|
||||
!!! Example |
||||
|
||||
=== "Python" |
||||
|
||||
```python |
||||
from ultralytics import YOLOWorld |
||||
|
||||
# Initialize a YOLO-World model |
||||
model = YOLOWorld('yolov8s-world.pt') # or select yolov8m/l-world.pt for different sizes |
||||
|
||||
# Execute inference with the YOLOv8s-world model on the specified image |
||||
results = model.predict('path/to/image.jpg') |
||||
|
||||
# Show results |
||||
results[0].show() |
||||
``` |
||||
|
||||
=== "CLI" |
||||
|
||||
```bash |
||||
# Perform object detection using a YOLO-World model |
||||
yolo predict model=yolov8s-world.pt source=path/to/image.jpg imgsz=640 |
||||
``` |
||||
|
||||
This snippet demonstrates the simplicity of loading a pre-trained model and running a prediction on an image. |
||||
|
||||
### Val Usage |
||||
|
||||
Model validation on a dataset is streamlined as follows: |
||||
|
||||
!!! Example |
||||
|
||||
=== "Python" |
||||
|
||||
```python |
||||
from ultralytics import YOLO |
||||
|
||||
# Create a YOLO-World model |
||||
model = YOLO('yolov8s-world.pt') # or select yolov8m/l-world.pt for different sizes |
||||
|
||||
# Conduct model validation on the COCO8 example dataset |
||||
metrics = model.val(data='coco8.yaml') |
||||
``` |
||||
|
||||
=== "CLI" |
||||
|
||||
```bash |
||||
# Validate a YOLO-World model on the COCO8 dataset with a specified image size |
||||
yolo val model=yolov8s-world.pt data=coco8.yaml imgsz=640 |
||||
``` |
||||
|
||||
!!! Note |
||||
|
||||
The YOLO-World models provided by Ultralytics come pre-configured with [COCO dataset](../datasets/detect/coco) categories as part of their offline vocabulary, enhancing efficiency for immediate application. This integration allows the YOLOv8-World models to directly recognize and predict the 80 standard categories defined in the COCO dataset without requiring additional setup or customization. |
||||
|
||||
### Set prompts |
||||
|
||||
 |
||||
|
||||
The YOLO-World framework allows for the dynamic specification of classes through custom prompts, empowering users to tailor the model to their specific needs **without retraining**. This feature is particularly useful for adapting the model to new domains or specific tasks that were not originally part of the training data. By setting custom prompts, users can essentially guide the model's focus towards objects of interest, enhancing the relevance and accuracy of the detection results. |
||||
|
||||
For instance, if your application only requires detecting 'person' and 'bus' objects, you can specify these classes directly: |
||||
|
||||
!!! Example |
||||
|
||||
=== "Custom Inference Prompts" |
||||
|
||||
```python |
||||
from ultralytics import YOLO |
||||
|
||||
# Initialize a YOLO-World model |
||||
model = YOLO('yolov8s-world.pt') # or choose yolov8m/l-world.pt |
||||
|
||||
# Define custom classes |
||||
model.set_classes(["person", "bus"]) |
||||
|
||||
# Execute prediction for specified categories on an image |
||||
results = model.predict('path/to/image.jpg') |
||||
|
||||
# Show results |
||||
results[0].show() |
||||
``` |
||||
|
||||
You can also save a model after setting custom classes. By doing this you create a version of the YOLO-World model that is specialized for your specific use case. This process embeds your custom class definitions directly into the model file, making the model ready to use with your specified classes without further adjustments. Follow these steps to save and load your custom YOLOv8 model: |
||||
|
||||
!!! Example |
||||
|
||||
=== "Persisting Models with Custom Vocabulary" |
||||
|
||||
First load a YOLO-World model, set custom classes for it and save it: |
||||
|
||||
```python |
||||
from ultralytics import YOLO |
||||
|
||||
# Initialize a YOLO-World model |
||||
model = YOLO('yolov8s-world.pt') # or select yolov8m/l-world.pt |
||||
|
||||
# Define custom classes |
||||
model.set_classes(["person", "bus"]) |
||||
|
||||
# Save the model with the defined offline vocabulary |
||||
model.save("custom_yolov8s.pt") |
||||
``` |
||||
|
||||
After saving, the custom_yolov8s.pt model behaves like any other pre-trained YOLOv8 model but with a key difference: it is now optimized to detect only the classes you have defined. This customization can significantly improve detection performance and efficiency for your specific application scenarios. |
||||
|
||||
```python |
||||
from ultralytics import YOLO |
||||
|
||||
# Load your custom model |
||||
model = YOLO('custom_yolov8s.pt') |
||||
|
||||
# Run inference to detect your custom classes |
||||
results = model.predict('path/to/image.jpg') |
||||
|
||||
# Show results |
||||
results[0].show() |
||||
``` |
||||
|
||||
### Benefits of Saving with Custom Vocabulary |
||||
|
||||
- **Efficiency**: Streamlines the detection process by focusing on relevant objects, reducing computational overhead and speeding up inference. |
||||
- **Flexibility**: Allows for easy adaptation of the model to new or niche detection tasks without the need for extensive retraining or data collection. |
||||
- **Simplicity**: Simplifies deployment by eliminating the need to repeatedly specify custom classes at runtime, making the model directly usable with its embedded vocabulary. |
||||
- **Performance**: Enhances detection accuracy for specified classes by focusing the model's attention and resources on recognizing the defined objects. |
||||
|
||||
This approach provides a powerful means of customizing state-of-the-art object detection models for specific tasks, making advanced AI more accessible and applicable to a broader range of practical applications. |
||||
|
||||
## Citations and Acknowledgements |
||||
|
||||
We extend our gratitude to the [Tencent AILab Computer Vision Center](https://ai.tencent.com/) for their pioneering work in real-time open-vocabulary object detection with YOLO-World: |
||||
|
||||
!!! Quote "" |
||||
|
||||
=== "BibTeX" |
||||
|
||||
```bibtex |
||||
@article{cheng2024yolow, |
||||
title={YOLO-World: Real-Time Open-Vocabulary Object Detection}, |
||||
author={Cheng, Tianheng and Song, Lin and Ge, Yixiao and Liu, Wenyu and Wang, Xinggang and Shan, Ying}, |
||||
journal={arXiv preprint arXiv:2401.17270}, |
||||
year={2024} |
||||
} |
||||
``` |
||||
|
||||
For further reading, the original YOLO-World paper is available on [arXiv](https://arxiv.org/pdf/2401.17270v2.pdf). The project's source code and additional resources can be accessed via their [GitHub repository](https://github.com/AILab-CVC/YOLO-World). We appreciate their commitment to advancing the field and sharing their valuable insights with the community. |
||||
@ -0,0 +1,46 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect |
||||
|
||||
# Parameters |
||||
nc: 80 # number of classes |
||||
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n' |
||||
# [depth, width, max_channels] |
||||
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs |
||||
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs |
||||
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs |
||||
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs |
||||
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs |
||||
|
||||
# YOLOv8.0n backbone |
||||
backbone: |
||||
# [from, repeats, module, args] |
||||
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 |
||||
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 |
||||
- [-1, 3, C2f, [128, True]] |
||||
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 |
||||
- [-1, 6, C2f, [256, True]] |
||||
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 |
||||
- [-1, 6, C2f, [512, True]] |
||||
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 |
||||
- [-1, 3, C2f, [1024, True]] |
||||
- [-1, 1, SPPF, [1024, 5]] # 9 |
||||
|
||||
# YOLOv8.0n head |
||||
head: |
||||
- [-1, 1, nn.Upsample, [None, 2, "nearest"]] |
||||
- [[-1, 6], 1, Concat, [1]] # cat backbone P4 |
||||
- [-1, 2, C2fAttn, [512, 256, 8]] # 12 |
||||
|
||||
- [-1, 1, nn.Upsample, [None, 2, "nearest"]] |
||||
- [[-1, 4], 1, Concat, [1]] # cat backbone P3 |
||||
- [-1, 2, C2fAttn, [256, 128, 4]] # 15 (P3/8-small) |
||||
|
||||
- [15, 1, Conv, [256, 3, 2]] |
||||
- [[-1, 12], 1, Concat, [1]] # cat head P4 |
||||
- [-1, 2, C2fAttn, [512, 256, 8]] # 18 (P4/16-medium) |
||||
|
||||
- [-1, 1, Conv, [512, 3, 2]] |
||||
- [[-1, 9], 1, Concat, [1]] # cat head P5 |
||||
- [-1, 2, C2fAttn, [1024, 512, 16]] # 21 (P5/32-large) |
||||
|
||||
- [[15, 18, 21], 1, WorldDetect, [nc, 512, True]] # Detect(P3, P4, P5) |
||||
@ -0,0 +1,48 @@ |
||||
# Ultralytics YOLO 🚀, AGPL-3.0 license |
||||
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect |
||||
|
||||
# Parameters |
||||
nc: 80 # number of classes |
||||
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n' |
||||
# [depth, width, max_channels] |
||||
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs |
||||
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs |
||||
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs |
||||
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs |
||||
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs |
||||
|
||||
# YOLOv8.0n backbone |
||||
backbone: |
||||
# [from, repeats, module, args] |
||||
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 |
||||
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 |
||||
- [-1, 3, C2f, [128, True]] |
||||
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 |
||||
- [-1, 6, C2f, [256, True]] |
||||
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 |
||||
- [-1, 6, C2f, [512, True]] |
||||
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 |
||||
- [-1, 3, C2f, [1024, True]] |
||||
- [-1, 1, SPPF, [1024, 5]] # 9 |
||||
|
||||
# YOLOv8.0n head |
||||
head: |
||||
- [-1, 1, nn.Upsample, [None, 2, "nearest"]] |
||||
- [[-1, 6], 1, Concat, [1]] # cat backbone P4 |
||||
- [-1, 3, C2fAttn, [512, 256, 8]] # 12 |
||||
|
||||
- [-1, 1, nn.Upsample, [None, 2, "nearest"]] |
||||
- [[-1, 4], 1, Concat, [1]] # cat backbone P3 |
||||
- [-1, 3, C2fAttn, [256, 128, 4]] # 15 (P3/8-small) |
||||
|
||||
- [[15, 12, 9], 1, ImagePoolingAttn, [256]] # 16 (P3/8-small) |
||||
|
||||
- [15, 1, Conv, [256, 3, 2]] |
||||
- [[-1, 12], 1, Concat, [1]] # cat head P4 |
||||
- [-1, 3, C2fAttn, [512, 256, 8]] # 19 (P4/16-medium) |
||||
|
||||
- [-1, 1, Conv, [512, 3, 2]] |
||||
- [[-1, 9], 1, Concat, [1]] # cat head P5 |
||||
- [-1, 3, C2fAttn, [1024, 512, 16]] # 22 (P5/32-large) |
||||
|
||||
- [[15, 19, 22], 1, WorldDetect, [nc, 512, False]] # Detect(P3, P4, P5) |
||||
Loading…
Reference in new issue