-
-  +
+
+
+ 
 -
-
-
-  +
+
+
+ 
 @@ -229,9 +229,9 @@ Our key integrations with leading AI platforms extend the functionality of Ultra
@@ -229,9 +229,9 @@ Our key integrations with leading AI platforms extend the functionality of Ultra

-| Roboflow | ClearML ⭐ NEW | Comet ⭐ NEW | Neural Magic ⭐ NEW |
-| :--------------------------------------------------------------------------------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------: |
-| Label and export your custom datasets directly to YOLO11 for training with [Roboflow](https://roboflow.com/?ref=ultralytics) | Automatically track, visualize and even remotely train YOLO11 using [ClearML](https://clear.ml/) (open-source!) | Free forever, [Comet](https://bit.ly/yolov5-readme-comet) lets you save YOLO11 models, resume training, and interactively visualize and debug predictions | Run YOLO11 inference up to 6x faster with [Neural Magic DeepSparse](https://bit.ly/yolov5-neuralmagic) |
+| Ultralytics HUB 🚀 | W&B | Comet ⭐ NEW | Neural Magic |
+| :----------------------------------------------------------------------------------------------------------------------------: | :-----------------------------------------------------------------------------------------------------------------------------: | :-------------------------------------------------------------------------------------------------------------------------------------------------------: | :----------------------------------------------------------------------------------------------------: |
+| Streamline YOLO workflows: Label, train, and deploy effortlessly with [Ultralytics HUB](https://ultralytics.com/hub). Try now! | Track experiments, hyperparameters, and results with [Weights & Biases](https://docs.wandb.ai/guides/integrations/ultralytics/) | Free forever, [Comet](https://bit.ly/yolov5-readme-comet) lets you save YOLO11 models, resume training, and interactively visualize and debug predictions | Run YOLO11 inference up to 6x faster with [Neural Magic DeepSparse](https://bit.ly/yolov5-neuralmagic) |
## Ultralytics HUB
diff --git a/README.zh-CN.md b/README.zh-CN.md
index ca49bb8ad1..ae2ded2ea9 100644
--- a/README.zh-CN.md
+++ b/README.zh-CN.md
@@ -116,7 +116,7 @@ path = model.export(format="onnx") # 返回导出模型的路径
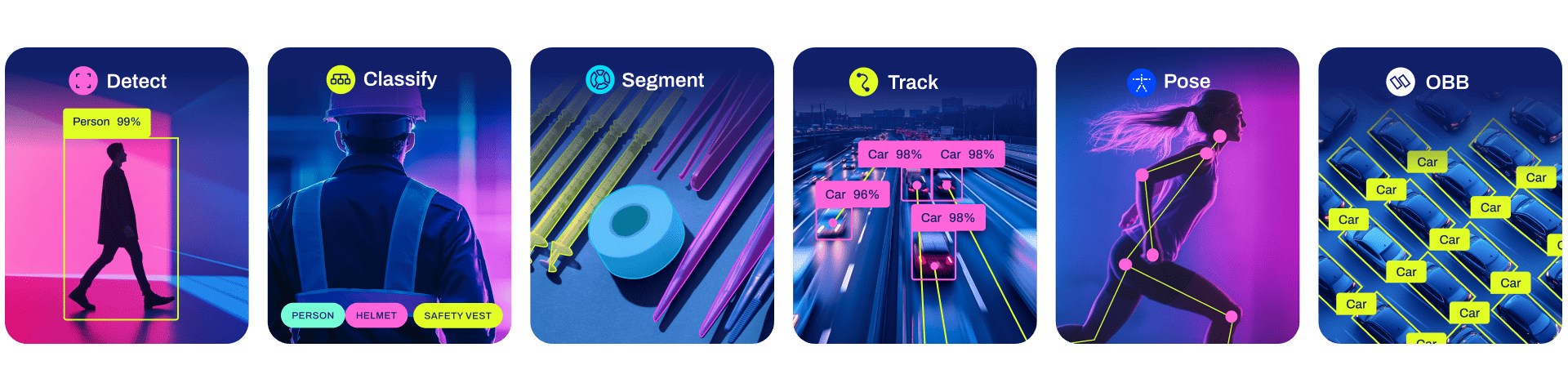
YOLO11 [检测](https://docs.ultralytics.com/tasks/detect/)、[分割](https://docs.ultralytics.com/tasks/segment/) 和 [姿态](https://docs.ultralytics.com/tasks/pose/) 模型在 [COCO](https://docs.ultralytics.com/datasets/detect/coco/) 数据集上进行预训练,这些模型可在此处获得,此外还有在 [ImageNet](https://docs.ultralytics.com/datasets/classify/imagenet/) 数据集上预训练的 YOLO11 [分类](https://docs.ultralytics.com/tasks/classify/) 模型。所有检测、分割和姿态模型均支持 [跟踪](https://docs.ultralytics.com/modes/track/) 模式。
- +
所有[模型](https://github.com/ultralytics/ultralytics/tree/main/ultralytics/cfg/models)在首次使用时自动从最新的 Ultralytics [发布](https://github.com/ultralytics/assets/releases)下载。
@@ -207,7 +207,7 @@ YOLO11 [检测](https://docs.ultralytics.com/tasks/detect/)、[分割](https://d
##
+
所有[模型](https://github.com/ultralytics/ultralytics/tree/main/ultralytics/cfg/models)在首次使用时自动从最新的 Ultralytics [发布](https://github.com/ultralytics/assets/releases)下载。
@@ -207,7 +207,7 @@ YOLO11 [检测](https://docs.ultralytics.com/tasks/detect/)、[分割](https://d
## 集成
-我们与领先的 AI 平台的关键集成扩展了 Ultralytics 产品的功能,增强了数据集标记、训练、可视化和模型管理等任务的能力。了解 Ultralytics 如何与 [Roboflow](https://roboflow.com/?ref=ultralytics)、ClearML、[Comet](https://bit.ly/yolov8-readme-comet)、Neural Magic 和 [OpenVINO](https://docs.ultralytics.com/integrations/openvino/) 合作,优化您的 AI 工作流程。
+我们与领先的 AI 平台的关键集成扩展了 Ultralytics 产品的功能,提升了数据集标注、训练、可视化和模型管理等任务。探索 Ultralytics 如何通过与 [W&B](https://docs.wandb.ai/guides/integrations/ultralytics/)、[Comet](https://bit.ly/yolov8-readme-comet)、[Roboflow](https://roboflow.com/?ref=ultralytics) 和 [OpenVINO](https://docs.ultralytics.com/integrations/openvino/) 的合作,优化您的 AI 工作流程。