- Fixed width and height swap in board size
- Fixed defaults in command line hint
- Fixed board visualization for Charuco case
- Used matchImagePoints method to handle partially detected Charuco boards
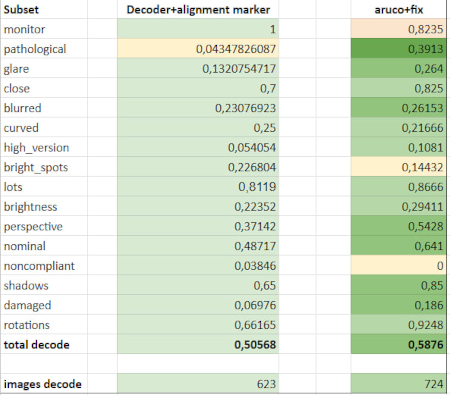
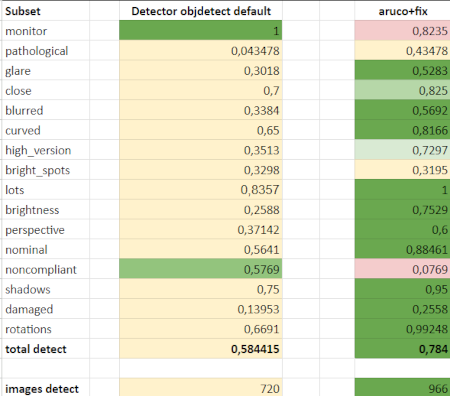
add ChArUco board pattern into calib3d/camera_calibration #23575
Added opportunity to calibrate camera using ChArUco board pattern in /samples/cpp/tutorial_code/calib3d/camera_calibration/caera_calibration.cpp
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Added charuco board generation to gen_pattern.py #23363
added charuco board generation in gen_pattern.py
moved aruco_dict_utils.cpp to samples from opencv_contrib (https://github.com/opencv/opencv_contrib/pull/3464)
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Added charuco pattern into calibrate.py #23587
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Improve document of cv::RotatedRect for #23335#23342fix#23335
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Add charuco pattern into calibration.cpp #23486
Added charuco pattern into calibration.cpp. Added charuco pattern with predefined aruco dictionary and with dictionary from file.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [х] I agree to contribute to the project under Apache 2 License.
- [х] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [х] The PR is proposed to the proper branch
- [х] There is a reference to the original bug report and related work
- [х] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [х] The feature is well documented and sample code can be built with the project CMake
Add python sample of how to use Orbbec camera. #23531
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Fix image loading in tutorials code #23442
Fixes https://github.com/opencv/opencv/issues/23378
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [X] I agree to contribute to the project under Apache 2 License.
- [X] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [X] The PR is proposed to the proper branch
- [X] There is a reference to the original bug report and related work
- [X] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [X] The feature is well documented and sample code can be built with the project CMake
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [ ] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [ ] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Usage of imread(): magic number 0, unchecked result
* docs: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* samples, apps: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* tests: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* doc/py_tutorials: check imread() result
[teset data in opencv_extra](https://github.com/opencv/opencv_extra/pull/1016)
NanoTrack is an extremely lightweight and fast object-tracking model.
The total size is **1.1 MB**.
And the FPS on M1 chip is **150**, on Raspberry Pi 4 is about **30**. (Float32 CPU only)
With this model, many users can run object tracking on the edge device.
The author of NanoTrack is @HonglinChu.
The original repo is https://github.com/HonglinChu/NanoTrack.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
* cmake: Fix DirectX detection in mingw
The pragma comment directive is valid for MSVC only. So, the DirectX detection
fails in mingw. The failure is fixed by adding the required linking library
(here d3d11) in the try_compile() function in OpenCVDetectDirectX.cmake file.
Also add a message if the first DirectX check fails.
* gapi: Fix compilation with mingw
These changes remove MSVC specific pragma directive. The compilation fails at
linking time due to absence of proper linking library. The required libraries
are added in corresponding CMakeLists.txt file.
* samples: Fix compilation with mingw
These changes remove MSVC specific pragma directive. The compilation fails at
linking time due to absence of proper linking library. The required libraries
are added in corresponding CMakeLists.txt file.
Add -imshow-scale flag to resize the image when displaying the results.
Add -enable-k3 flag to enable or disable the estimation of the K3 distortion coefficient.
Add flags to set the camera intrinsic parameters as an initial guess (can allow converging to the correct camera intrinsic parameters).
Add -imshow-scale flag to resize the image when displaying the results.
Add -enable-k3 flag to enable or disable the estimation of the K3 distortion coefficient.
* videoio: add support for obsensor (Orbbec RGB-D Camera )
* obsensor: code format issues fixed and some code optimized
* obsensor: fix typo and format issues
* obsensor: fix crosses initialization error
{kind=link}
{kind=link}